
техника выполнения через верхние и нижние блоки
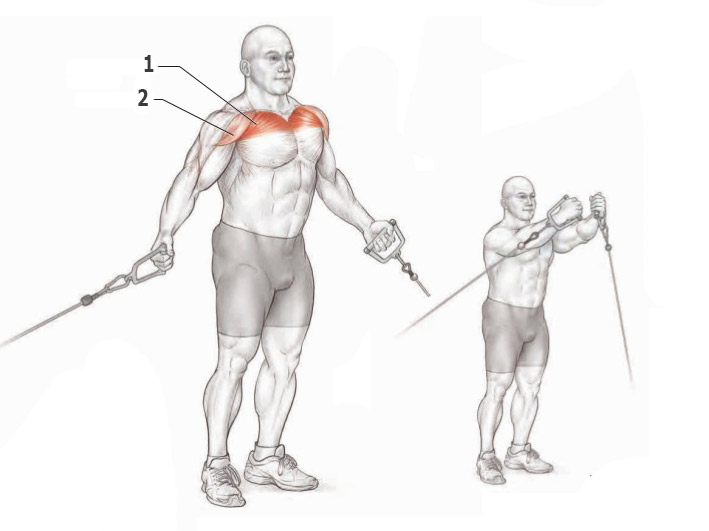
Сведение рук в кроссовере – эффективное изолированное упражнение для развития мышц груди. Выполняя его в разных вариациях, можно акцентировать нагрузку на разных участках грудных мышц: верхней, нижней, внутренней или нижней части. Существует несколько основных вариаций сведений рук в кроссовере: стоя, лежа на скамье, через верхние или нижние блоки. О том, как правильно делать все разновидности этого упражнения, и пойдет речь в нашей сегодняшней статье.
Польза и противопоказания
Прежде, чем перейти к рассказу о технике выполнения упражнения, коротко опишем, какие преимущества и пользу оно дает спортсмену, а также кому его выполнение противопоказано и по каким причинам.
Польза упражнения
С помощью сведений рук в кроссовере можно сделать огромный скачок в развитии грудных мышц. Оно идеально подходит для того, чтобы научиться правильно их «включать», так как работа носит изолированный характер, плечи и трицепс из движения практически выключены, чего нельзя сказать о других упражнениях на грудь.
Как правило, сведения рук в кроссовере ставят ближе к концу тренировки груди, чтобы добиться максимального кровенаполнения. Работа ведется в большом диапазоне повторений – от 12 и выше. Рабочий вес не имеет особого значения, намного важнее чувствовать растяжение и сокращение грудных мышц.
© zamuruev — stock.adobe.com
Противопоказания к выполнению упражнения
Не рекомендуется выполнять сведения в кроссовере лежа спортсменам, имеющим такие заболевания:
- неврит плечевого нерва;
- тендобурсит;
- тендинит.
Слишком сильная растяжка грудных мышц в нижней точке будет перенапрягать плечевые суставы и связки, и хроническая боль будет ощущаться намного сильнее. К классическим сведениям рук в кроссовере стоя через верхние блоки это меньше относится, но все равно нужно соблюдать осторожность и не использовать чрезмерно тяжелые рабочие веса.
Новичкам не рекомендуется делать сведение рук в кроссовере через нижние блоки. Это очень сложное с точки зрения техники упражнения, требующее нереальной нейромышечной связи. У новичков этого просто нет. Лучше развивайте верх груди с помощью наклонных жимов и разводок, а когда заметите увеличение мышечной массы, можете плавно приступать к выполнению сведений рук в кроссовере.
У новичков этого просто нет. Лучше развивайте верх груди с помощью наклонных жимов и разводок, а когда заметите увеличение мышечной массы, можете плавно приступать к выполнению сведений рук в кроссовере.
Какие мышцы работают при упражнении?
Если вы все делаете правильно, то почти вся нагрузка ложится на грудные мышцы. Небольшое статическое напряжение присутствует в бицепсах, трицепсах и передних дельтах, но оно должно не мешать вам концентрироваться на работе груди. Если чувствуете, что плечи и трицепсы устают не меньше, чем грудь, значит, рабочий вес слишком большой.
Стабилизаторами выступают мышцы пресса и ягодицы, за счет них мы занимаем правильное положение.
Техника выполнения упражнения
Ниже мы расскажем о технике выполнения нескольких видов упражнения на сведение рук в кроссовере.
Классический вариант
Классическое сведение рук в кроссовере через верхние блоки делается следующим образом:
- Возьмитесь за рукоятки кроссовера и поставьте ноги на одну линию.
 Старайтесь не делать шаг вперед, так как это приводит к крутящему моменту в позвоночнике и может привести к травме.
Старайтесь не делать шаг вперед, так как это приводит к крутящему моменту в позвоночнике и может привести к травме. - Наклонитесь вперед, сохраняя спину прямой. Чем сильнее наклон, тем больше будет работать верх груди. Оптимальнее всего удерживать наклон в 45 градусов на протяжении всего подхода.
- Плавно сведите руки перед собой, делая выдох. Старайтесь делать движение только за счет работы мышц груди, плечи и руки в движении участвовать не должны, руки должны быть согнуты совсем немного. В точке пикового сокращения сделайте небольшую паузы – так вы акцентируете нагрузку на внутренней части (середине) груди.
- Делая вдох, не торопясь разведите руки в стороны. Немного растяните внешнюю часть груди и сделайте еще одно повторение.
 Старайтесь не делать шаг вперед, так как это приводит к крутящему моменту в позвоночнике и может привести к травме.
Старайтесь не делать шаг вперед, так как это приводит к крутящему моменту в позвоночнике и может привести к травме.© Makatserchyk — stock.adobe.com
Упражнение на нижних блоках
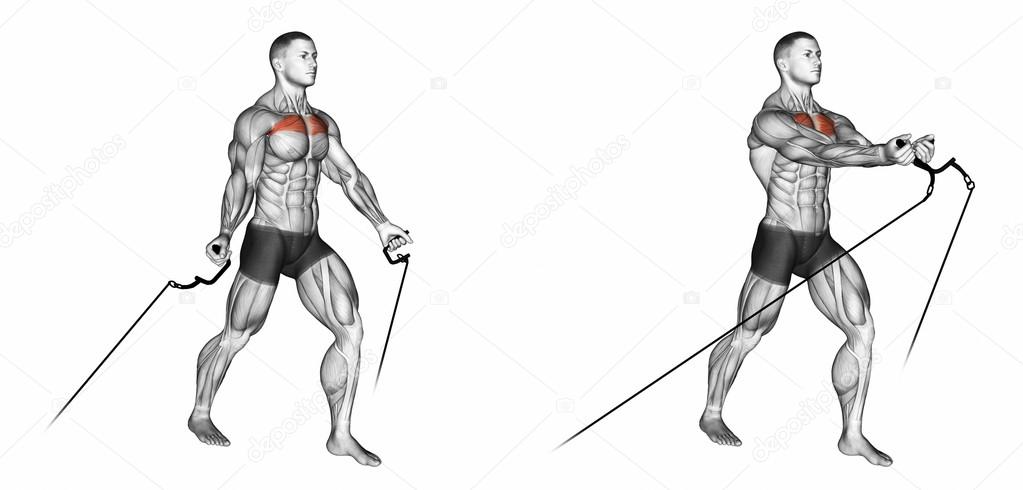
Сведение рук в кроссовере через нижние блоки с акцентом на верхнюю часть груди делается следующим образом:
- Возьмите рукоятки нижних блоков и поставьте ноги на ширине плеч. Негативная фаза движения здесь не так важна, растяжения в нижней точке амплитуды намного меньше, поэтому не нужно пытаться «натягивать» внешнюю часть груди.
- Подайте грудь немного вперед и вверх, а плечи отведите назад – так вы снимите с них большую часть нагрузки и сможете сконцентрироваться на изолированной работе верха груди.
- На вдохе начните поднимать руки вверх и сводить их перед собой. Движение должно быть плавным. Ни в коем случае не напрягаем бицепсы, иначе 90% нагрузки упадет на них. Задержитесь на секунду в точке пикового сокращения, чтобы как следует прожать мышцы груди.
- Делая вдох, плавно опустите руки вниз, сохраняя прогиб в грудном отделе позвоночника и не подавая плечи вперед или вверх.
 Негативная фаза движения здесь не так важна, растяжения в нижней точке амплитуды намного меньше, поэтому не нужно пытаться «натягивать» внешнюю часть груди.
Негативная фаза движения здесь не так важна, растяжения в нижней точке амплитуды намного меньше, поэтому не нужно пытаться «натягивать» внешнюю часть груди.© Makatserchyk — stock.adobe.com
Тренировка в кроссовере лежа на скамье
Сведение рук в кроссовере лежа на скамье выполняется следующим образом:
- Возьмите рукоятки нижних блоков и лягте на скамью. Скамья должна располагаться точно между рукоятями.
- Опустите плечи вниз, сведите лопатки и не прогибайте поясницу. Ноги при желании можно поставить на скамью или поднять в воздух, чтобы не было желания со всей силы упереться ими в пол и облегчить себе задачу.
- Начните сводить рукоятки над собой. Внешне упражнение похоже на разводку гантелей, но только внешне. За счет устройства блочного тренажера создается дополнительное сопротивление, которое постоянно приходится преодолевать. Гантели такого не дают.
- Продолжайте сводить руки, пока между рукоятками не останется 5-10 см. В этой точке нужно на секунду задержаться и еще сильнее напрячь грудь. Именно грудь, не бицепсы. Если в этот момент у вас начинает сводить мышцы груди, значит, вы все делаете правильно.
- Плавно опускаем рукоятки вниз. В нижней точке тоже делаем небольшую задержку, чтобы как следует растянуть мышечные фасции.

 В нижней точке тоже делаем небольшую задержку, чтобы как следует растянуть мышечные фасции.
В нижней точке тоже делаем небольшую задержку, чтобы как следует растянуть мышечные фасции.© Makatserchyk — stock.adobe.com
Чем заменить упражнение?
Работа в кроссовере дает очень необычную нагрузку, никакое упражнение со свободным весом не даст вам стопроцентную нагрузку на грудные мышцы в течение всего подхода. Если по каким-то причинам вам не подходит ни одна из вариаций этого упражнения, то единственное, на что вы можете заменить сведения рук в кроссовере – сведение рук в «бабочке» (пек-деке). Это тоже блочный тренажер, поэтому нагрузка будет почти одинаковой. Единственное отличие – в «бабочке» уже задана позиция, поэтому практически невозможно варьировать нагрузку и акцентировать ее на той или иной части груди.
© Makatserchyk — stock.adobe.com
Если в вашем тренажерном зале нет «бабочки», можете работать в тренажере для отведений на заднюю дельту, сев спиной вперед – эффект будет точно такой же.
Подписывайтесь на наш канал в Яндекс. Дзен!
Дзен!
Стаж тренировок — более 8-ми лет. Победитель и призёр всероссийских турниров по пауэрлифтингу и становой тяге. Кандидат в мастера спорта по становой тяге.
Редакция cross.expert
Сведение рук в кроссовере: качай грудь правильно | willandwin.ru
Какие мышцы работаю при сведении рук в кроссовере?
Главными работающими мышцами при сведении рук в кроссовере, будет конечно грудная область, а точнее:
- Большая
- Малая грудные мышцы
А так же второстепенные мускулы, которые тоже участвуют в движении и будут являться ассистентами. К ним относится:
- Передняя головка дельтовидных
- Зубчатая мышца
Также, при сведении рук в кроссовере можно воздействовать на разные области грудных мышц. На нижнюю, среднюю либо верхнюю. Об этом мы поговорим чуть позже.
Варианты сведений рук в кроссовере
Сведение рук в кроссовере с нижнего блока стоя
Данный вариант направлен на проработку верха грудных мышц.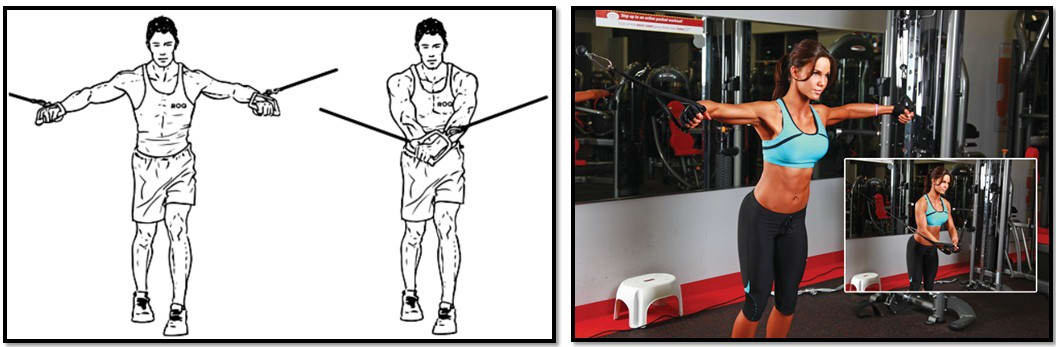 Он поможет сформировать и прорисовать грудь в районе ключицы. Выполняется упражнение с блоков установленных внизу, которые мы будем тянуть вверх, на немного согнутых руках. Так как упражнение изолированное, то его стоит делать с маленьким весом на большое количество повторений от 12 до 20. Главное почувствовать жжение в верхних отделах груди, это и будет оптимальное число раз. При выполнении данного варианта, вы должны чувствовать как работает верх груди и плечевой сустав. Если же у вас забиваются руки, тогда уменьшите вес. Старайтесь опускать блоки как можно ниже, это сильнее растянет мышцы и увеличит получаемый результат. Сведение с нижнего блока лучше всего ставить в конце тренировки, для максимального пампа(наливания кровью) грудных. Если же делать его в начале, вы просто на просто утомите работающие мышцы и в базовых упражнениях не сможете отработать по максимуму.
Он поможет сформировать и прорисовать грудь в районе ключицы. Выполняется упражнение с блоков установленных внизу, которые мы будем тянуть вверх, на немного согнутых руках. Так как упражнение изолированное, то его стоит делать с маленьким весом на большое количество повторений от 12 до 20. Главное почувствовать жжение в верхних отделах груди, это и будет оптимальное число раз. При выполнении данного варианта, вы должны чувствовать как работает верх груди и плечевой сустав. Если же у вас забиваются руки, тогда уменьшите вес. Старайтесь опускать блоки как можно ниже, это сильнее растянет мышцы и увеличит получаемый результат. Сведение с нижнего блока лучше всего ставить в конце тренировки, для максимального пампа(наливания кровью) грудных. Если же делать его в начале, вы просто на просто утомите работающие мышцы и в базовых упражнениях не сможете отработать по максимуму.
- Установите в кроссовере самое нижнее положение. Поставьте нужный вам вес. Для упражнения мы будем использовать одинарные рукоятки железные или нейлоновые.
- Пройдите немного вперед, чтобы натянуть тросы кроссовера. Ноги стоят на одной линии, на ширине плеч. Если вам сложно удерживать устойчивое положение в такой позиции, тогда выставите одну из ног вперед и чередуйте их каждый новый подход.
- Немного наклоните корпус, спина прямая. В пояснице небольшой прогиб. Руки согнуты в локтях.
 Поставьте нужный вам вес. Для упражнения мы будем использовать одинарные рукоятки железные или нейлоновые.
Поставьте нужный вам вес. Для упражнения мы будем использовать одинарные рукоятки железные или нейлоновые. - Сделайте глубокий вдох и выжмите тросы вперед на высоту чуть выше груди, и сведите руки вместе. Сделайте выдох. Задержитесь ненадолго в таком положении для максимального напряжения грудных мышц.
- На выдохе плавно верните руки в исходное положение, максимально растянув мышцы груди.
Как некоторые говорят, представьте, как будто вы стоите в воде по пояс и набираете в руки воду. Движение достаточно простое, главное не спешите и контролируйте вес в верхней и нижней точке.
Сведение рук в кроссовере в наклоне
В данном упражнении, мы смещаем акцент на середину грудных мышц.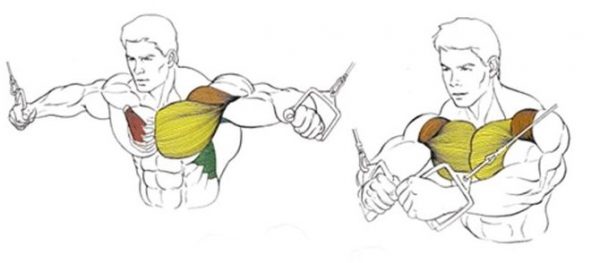 Блоки устанавливаются наверх.Прежде чем приступить к этому варианту, надо разобрать некоторые нюансы.
Блоки устанавливаются наверх.Прежде чем приступить к этому варианту, надо разобрать некоторые нюансы.
Во-первых, положение корпуса. Есть несколько возможных вариантов.
- Тело практически ровное с небольшим наклоном вперед.
- Наклон под углом от 30-45° градусов.
- И тело параллельно полу, то есть полный наклон до угла в 90°
Сильно большой разницы в эффекте от упражнения не будет. Может быть смещение акцента на мышцы груди, но они будут не столь значительны. Решать конечно только вам, так как все люди индивидуальны и для одного может работать то, что для другого будет просто тратой времени. Начните с классического варианта с небольшим наклоном вперед, а уже потом поэкспериментируйте и найдите свою формулу успеха.
Во-вторых, область куда мы будем сводить руки. Многие советуют сводить руки в районе живота, этот вариант больше нагрузит нижние отделы грудных, а мы же с вами стараемся прокачать середину. Поэтому наша задача, сводить руки в районе грудных.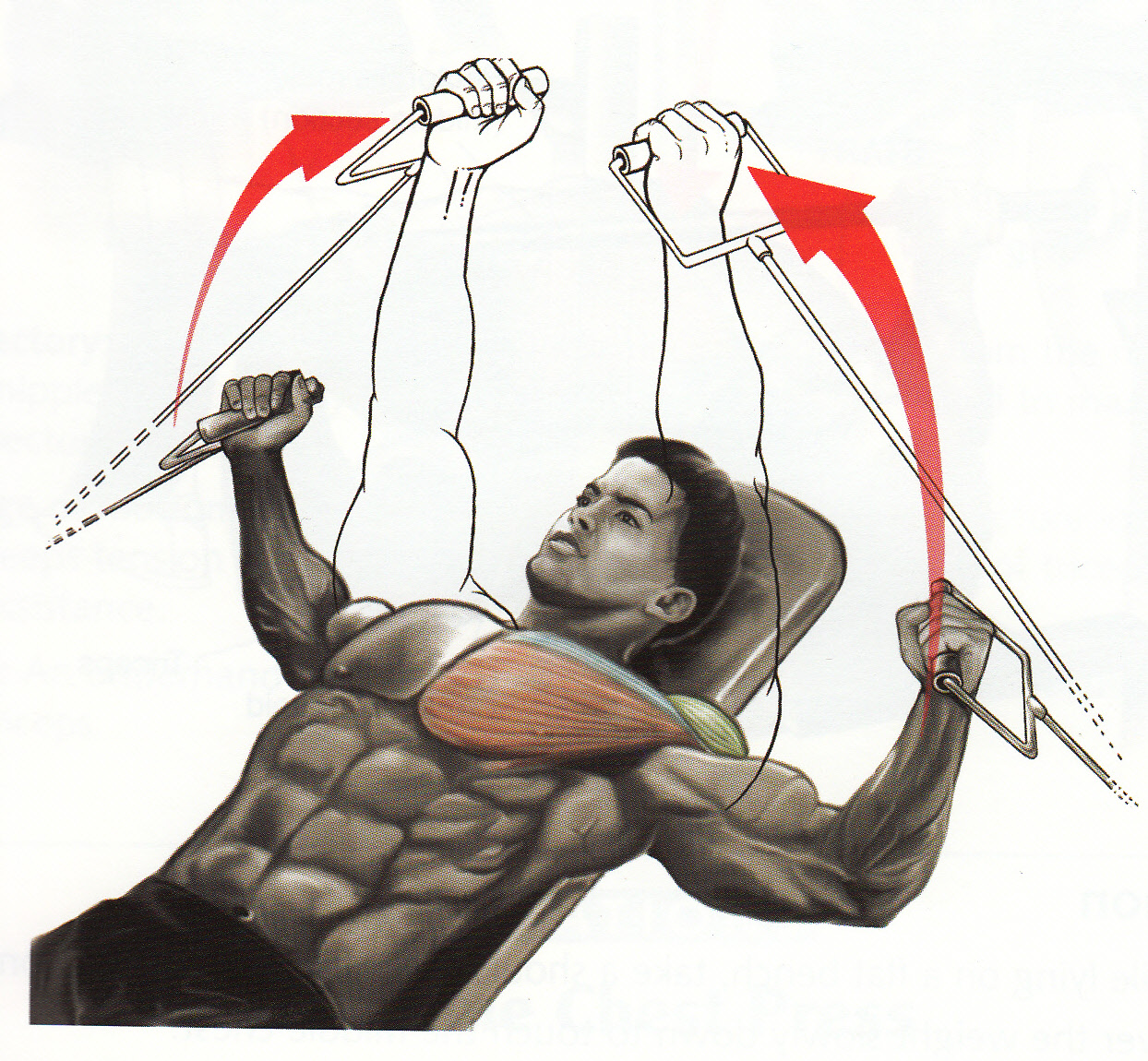
- Установите блоки тренажера наверх. Выберите подходящий для себя вес.
- Рукоятки используем такие же, как и в предыдущем упражнении(одноручные железные или нейлоновые).
- Сделайте небольшой шаг вперед, чтобы растянуть грудные. Ноги ставим на одну линию, если тяжело, то одну выводим вперед. Не забываем их чередовать каждый подход.
- Наклоняем туловище немного вперед. Спину держим ровной, в пояснице небольшой прогиб, грудь немного выставлена вперед.
- Руки разводим в стороны, пока не почувствуем растяжение грудных мышц. Локти при этом, немного согнуты.
- Сделайте вдох и наполните грудные мышцы воздухом.
- На выдохе начинаем сводить руки перед грудью, до касания ими друг друга. Задержитесь ненадолго в этом положении, что бы максимально напрячь грудь.
- На выдохе начинаем разводить руки в стороны до исходного положения, стараясь как можно сильней растянуть грудные мышцы
Движение также не сложное.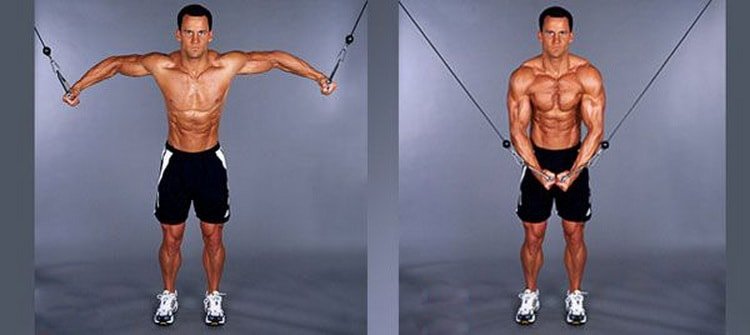 Представьте, как будто вы пытаетесь обнять большое дерево.
Представьте, как будто вы пытаетесь обнять большое дерево.
Свидание рук в кроссовере «крест»
Данный вариант направлен на развитие нижних отделов грудных мышц, а точнее придания им выразительной формы. К сожалению, его очень редко можно увидеть в тренажерном зале, но это не делает его неэффективным. Просто некоторые о нем никогда не слышали. Хорошо, что мы с вами не они. Выполнять его можно как самостоятельно, так в комплексе с остальными вариантами. Упражнение называется «Крест» так как мы будем разводить руки в стороны параллельно туловищу, до максимального их растяжения.
Техника выполнения:Исходное положение- Установите блоки тренажера на самый верх. Выберите подходящий вес.
- Становимся четко посередине между тросами кроссовера.
- В данном варианте, мы не будем выходить вперед как в двух предыдущих вариантах. Ноги ставим вместе или на ширину плеч.
- Беремся за рукоятки и разводим руки в стороны. В локте сохраняем небольшой изгиб.
- Наберите воздух в легкие и на выдохе с усилием выжмите руки в направлении друг друга, до момента пока они не соединятся. Опускать следует в район паха.
- Задержитесь ненадолго в данном положении. И на вдохе вернитесь в исходное положение, максимально растянув грудные. Но при этом, сохраните в них нагрузку.
Главное в этом упражнении, в верхней точке не допустить полного опускания блоков кроссовера. Это приведет к мышечному расслаблению. Также, ваш корпус должен оставаться неподвижным на протяжении всего выполнения. Если вам это не удается, значит вы взяли слишком большой вес.
Сведение рук в кроссовере лежа на скамье
В отличие от вариантов стоя, сведение лежа можно считать максимально изолированными, так как спина зафиксирована и полностью исключена из движения. Если вам сложно фокусироваться на положении тела и работой грудных одновременно. Тогда это упражнение для вас. Единственный минус, что вам придется таскать за собой скамью для жима. И если кроссовер занят, и вы делаете по очереди, то ее придется каждый подход убирать и устанавливать по новой. В зависимости от угла наклона скамьи, будет меняться степень воздействия на грудные мышцы. Тут действует точно такое же правило, как и при жиме штанги лежа:
И если кроссовер занят, и вы делаете по очереди, то ее придется каждый подход убирать и устанавливать по новой. В зависимости от угла наклона скамьи, будет меняться степень воздействия на грудные мышцы. Тут действует точно такое же правило, как и при жиме штанги лежа:
- При наклоне скамьи вверх на 35-45° загрузится верхняя часть груди
- При горизонтальном положении скамьи средняя
- А при наклоне вниз, нижняя
Технически упражнение напоминает предыдущие варианты.
Техника выполнения:Исходное положение- Установите скамью для жима между тросами кроссовера так, чтобы они были на уровне середины грудных мышц.
- Блоки тренажера поставьте в нижнее положение.
- Выберите нужное вам положение скамьи (наклон вверх, вниз или горизонтальное положение).
- Возьмите рукоятки в руки и лягте на скамью. Спина плотно лежит на поверхности, лопатки сведены навстречу друг другу. Грудь выставлена вперед, в пояснице небольшой прогиб. Ноги расставлены в стороны и твердо стоят на полу. В варианте с наклоном вниз, ноги будут закреплены ступнями под специальными удерживающими валиками.
- Сведите руки в верхней точке.
- Из этого положения мы и будем начинать движение.
 Ноги расставлены в стороны и твердо стоят на полу. В варианте с наклоном вниз, ноги будут закреплены ступнями под специальными удерживающими валиками.
Ноги расставлены в стороны и твердо стоят на полу. В варианте с наклоном вниз, ноги будут закреплены ступнями под специальными удерживающими валиками.- На выдохе начинаем разводить руки в разные стороны. Опускайте до того момента, пока не начнете испытывать дискомфорт в плечах. Это и будет ваша амплитуда движения.
- Ненадолго задержитесь в нижнем положении, чтобы максимально растянуть грудные мышцы. Далее делаем выдох и выжимаем руки в исходное положение.
Не забывайте про локти. Они должны быть немного согнуты на протяжении выполнения всего упражнения. Также, не опускайте вес слишком низко, вы можете травмировать плечи. Это же касается резких движений во время выполнения упражнения, делаем все плавно и подконтрольно.
Параллельные сведения сидя в кроссовере
Данный вид сведений, направлен на проработки средних отделов грудных мышц. Благодаря сидячему положению, мы можем не переживать об устойчивости корпуса. Так как таз, выступает в роли дополнительной точки опоры. Также, упор спины в скамью исключит ее из упражнения. Поэтому данный вариант подойдет для всех людей, даже тех, кто имеет травмы позвоночника. К сожалению, параллельное сведение сидя, теряет свою популярность, уступая место вариантам стоя. Причины все те же, что и при вариантах лежа. Тренажер очень популярен, а стоять ждать своей очереди еще и постоянно таскать скамью за собой, не каждому по душе. Но если вас не пугают трудности и вы хотите от своих тренировок получать максимум пользы, тогда эти сведения вы обязательно должны попробовать.
Благодаря сидячему положению, мы можем не переживать об устойчивости корпуса. Так как таз, выступает в роли дополнительной точки опоры. Также, упор спины в скамью исключит ее из упражнения. Поэтому данный вариант подойдет для всех людей, даже тех, кто имеет травмы позвоночника. К сожалению, параллельное сведение сидя, теряет свою популярность, уступая место вариантам стоя. Причины все те же, что и при вариантах лежа. Тренажер очень популярен, а стоять ждать своей очереди еще и постоянно таскать скамью за собой, не каждому по душе. Но если вас не пугают трудности и вы хотите от своих тренировок получать максимум пользы, тогда эти сведения вы обязательно должны попробовать.
- Установите скамью, между блоков кроссовера. Только не на одном уровне с ними, а немного вперед. Ориентиром для вас послужат грудные мышцы. Отодвигайте скамью вперед до тех пор, пока не почувствуете в них достаточное растяжение. Спинку поднимите до угла в 90°
- Блоки кроссовера, должна стоять на одном уровне с вашими грудными. То есть, после того как вы сели между ними и грудью должна быть прямая горизонтальная линия.
- Возьмитесь за рукоятки и сядьте на скамью.
- Сводим лопатки вместе, чтобы выставить грудь вперед и прижимаемся к скамье. Спина прямая, в пояснице небольшой прогиб.
- Сведите руки вместе.
 Спинку поднимите до угла в 90°
Спинку поднимите до угла в 90°- На вдохе разведите руки в стороны до максимально возможного растяжения грудных мышц.
- Делаем выдох и с усилием сводим руки перед грудью. Прижмите как можно сильнее руки друг к другу, чтобы придать пиковое сокращение грудным мышцам.
В отличие от остальных вариантов, во время сведения рук, мы можем немного разогнуть локти. Это еще сильнее нагрузит середину груди. Но главное не переусердствовать и обойтись без травм.
Всем успехов в тренировках!
упражнение для проработки грудных мышц
Кроссовер – это сведение руки в блочном тренажере. Изолированное упражнение для придания формы грудным мышцам. Оно хорошо подходит спортсменам, у которых базовая масса грудных мышц уже набрана, и ее необходимо отшлифовать.
Изолированное упражнение для придания формы грудным мышцам. Оно хорошо подходит спортсменам, у которых базовая масса грудных мышц уже набрана, и ее необходимо отшлифовать.
Работающие мышцы
Целевыми мышцами при выполнении этого упражнения являются грудные. В зависимости от вариации упражнения имеется возможность акцентировать нагрузку на их нижней, верхней или внутренней части.
Целевыми при выполнении упражнения являются грудные мышцы.В качестве дополнительных задействуются мышцы плеч, рук и спины. Ряд мускулов тела выполняет стабилизирующую функцию. В частности, это мускулатура пресса, ног и ягодиц.
Преимущество кроссоверов
Выполнение упражнений в блочном тренажере имеет свою специфику. Что касается такого упражнения, как кроссовер, основные его преимущества заключаются в следующем:
- Грудные мышцы все время находятся под нагрузкой. Сопротивление блоков не позволяет их расслабить ни на секунду. В то время как при выполнении упражнений на грудь с гантелями или штангой усилие носит скорее импульсный характер.
- Варьируя положение корпуса и направление сведений, можно проработать различные участки грудных мышц. Так, например, если мы делаем кроссовер сверху вниз, работает нижняя часть груди. Если, наоборот, тянем вверх ручки нижних блоков, акцент получается на верхе грудных. Делая кроссовер прямо перед собой, мы прорабатываем центр.
- Техника кроссовера подразумевает растягивание целевых мышц в верхней точке. Это позволяет увеличить амплитуду движения и заставить мышцу сократиться максимальным образом.
- Так как в этом упражнении не используются большие веса, оно значительно более безопасно для плечевых суставов, чем, скажем, жим лежа.

Техника выполнения
Зачастую в изолированных упражнениях техника играет более весомую роль, чем непосредственно отягощение. Кроссовер не является исключением. Наша задача не нагрузить мышцу по максимуму (для этого есть базовые упражнения), а заставить работать ее так, чтобы она росла нужным нам образом. Ну, или в случае использования упражнения для добивки – мы работаем с уже уставшей мышцей, поэтому большие веса также неактуальны.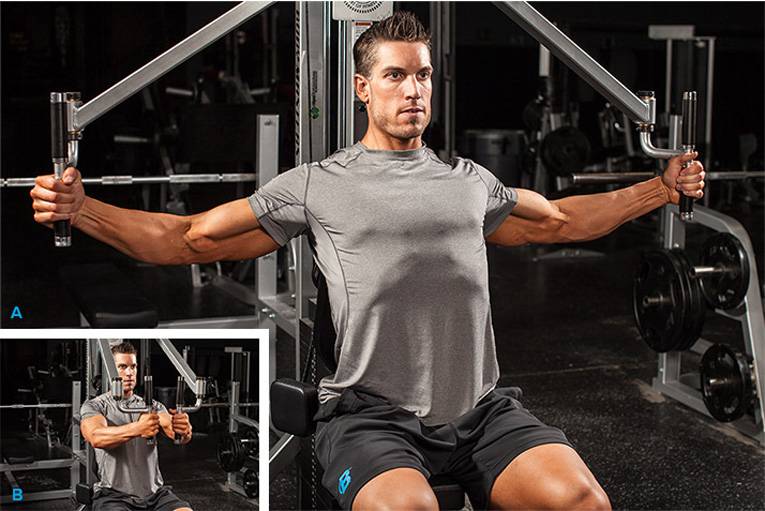
Рассмотрим кроссовер в классическом виде, оставив вариации напоследок.
- Выставите на тренажере необходимый вес. Он должен быть одинаковым справа и слева. Используйте такую нагрузку, которая позволит выполнять движения полностью подконтрольно, без рывков.
- Встаньте между стойками ровно, слегка наклонитесь вперед прямой спиной. Стопы поставьте на ширине плеч, колени можно слегка согнуть. Некоторые спортсмены выставляют одну ногу вперед для более устойчивого положения корпуса при наклоне. Такой подход имеет место быть, однако, при его использовании необходимо чередовать положение ног от подхода к подходу. Это позволит избежать несимметричности нагрузки на правую и левую сторону.
- Поднимите руки и возьмитесь ими за ручки блоков так, чтобы ощущалось растяжение грудных мышц. Локти при этом должны быть присогнуты (это правило сохраняется на протяжении всего движения), лопатки плотно прижаты к спине. Зафиксируйтесь в исходном положении.
- На выдохе, не сгибая спины и не меняя угла в локтях, медленно и подконтрольно сведите руки внизу перед собой. Внутренние стороны запястий должны быть направлены друг к другу. Концентрируйтесь на максимальном усилии грудных мышц. В нижней точке упражнения задержитесь на 1–2 секунды. Можете даже немного заводить одну руку за другую (поочередно) для увеличения амплитуды.
- На вдохе снова поднимите руки в исходное положение.
 Внутренние стороны запястий должны быть направлены друг к другу. Концентрируйтесь на максимальном усилии грудных мышц. В нижней точке упражнения задержитесь на 1–2 секунды. Можете даже немного заводить одну руку за другую (поочередно) для увеличения амплитуды.
Внутренние стороны запястий должны быть направлены друг к другу. Концентрируйтесь на максимальном усилии грудных мышц. В нижней точке упражнения задержитесь на 1–2 секунды. Можете даже немного заводить одну руку за другую (поочередно) для увеличения амплитуды.При выполнении упражнения не допускайте распрямления локтей. Угол около 10 градусов все время сохраняется. При правильной технике траектория движения кистей напоминает полукруг. Спина при этом все время должна оставаться прямой. Плечи следует расправить.
Также важно контролировать мышечное усилие и не позволять себе работать за счет рук. Мы тренируем именно грудные, помните об этом. Избегайте рывков – движение производится равномерно, мышцы не расслабляются ни на секунду.
Вариации для верха и середины груди
Как уже было сказано, классические кроссоверы по большей части воздействуют на низ грудных. Справедливости ради стоит привести вариации этого упражнения, сочетание которых поможет максимально отшлифовать форму грудных мышц со всех сторон.
В целом техника выполнения упражнения остается одной и той же, меняется только положение корпуса и направление тяги тросов.
Верх грудных
Когда нашей задачей является прорисовка верхнего контура груди, ручки нужно будет тянуть не сверху вниз, а снизу вверх. То есть, упражнение выполняется на нижнем блоке.
При использовании нижних блоков нагрузка перераспределяется на верхнюю часть груди.В исходном положении руки слегка присогнуты в локтях, опущены вниз по бокам от корпуса и слегка отведены назад (до ощущения растяжения грудных). Ладони направлены к корпусу. На выдохе руки нужно поднять и свести перед собой. На вдохе – вернуться в исходное положение.
Середина грудных
Чтобы проработать середину груди, закрепите блоки посередине опор и выполняйте сведения прямо перед собой. При таком положении руки в конечной точке будут направлены не вверх или вниз, а вперед.
Проработка центральной части груди.Также можете попробовать горизонтальный кроссовер. Для этого между опор тренажера ставится скамья. Вы ложитесь на нее корпусом и беретесь за ручки блоков в нижнем положении. Нагрузка будет аналогичной той, что вы получаете, выполняя сведение рук с гантелями. Однако, благодаря сопротивлению тренажера, ваши мышцы ни на секунду не расслабятся, то есть проработка будет еще более мощной.
Выполнение на горизонтальной скамье.Как строить тренировку
Вы можете поставить кроссоверы в свою тренировочную программу после более тяжелых базовых упражнений. Выполнять их следует по 10–15 повторов 2–3 подхода с небольшим или средним весом. Первостепенное значение имеет именно техника движений.
Также вы можете сочетать кроссовер с отжиманиями, выполняя по подходу того и другого упражнения без перерыва. То есть, например, делаете 20-30 отжиманий, потом сразу 10-15 сведений, потом отдыхаете — и следующий подход.
Сведение рук в кроссовере: техника выполнения, чем заменить
Сведение рук в кроссовере – изолирующее упражнение на низ груди, которое прорабатывает акцентировано низ груди. Те, кто хочет иметь красивое «отделение» грудной мышцы от пресса должны его делать в конце тренировки. Сведение в кроссовере можно делать как с верхним креплением блочной системы, так и с нижним, чтобы задействовать мышцы под разными углами. Заменяют движение иногда работой в петлях или с резиной, но для классического «билдерского» подреза грудной мышцы это движение считается незаменимым. Упражнение доступно как новичкам, так и профессионалам, и может выполняться как мужчинами, так и женщинами.
Техника упражнения
Исходное положение
Важно определить место крепления рукояток. Высокие атлеты могут закреплять блочную систему на самый верхний фиксатор, при среднем росте имеет смысл опускать ее так, чтобы в верхней точке разведения рук плечи не блокировались в дискомфортном положении, и атлет не терял контроль за мышцами кора и груди. Если во время движения спортсмена «подбрасывает», он выбрал неправильную высоту фиксатора.
Рукоятки используются изогнутые или D-образные. Если в зале нет таких рукояток, можно одеть два круглых фиксатора, и выполнять движение с небольшим сопротивлением хватом за круглые фиксаторы.
Принимая исходное положение, важно не травмироваться. Сначала захватывают одну рукоятку, и приводят ее к поясу, затем – вторую, после чего нужно расположить тело в центре кроссовера так, чтобы тросы натянулись одинаково. Допускается устойчивая стойка «в ножницы», или на двух ногах в наклоне, это не принципиально.
Далее следует напрячь пресс, подтянуть ягодицы и аккуратно развести руки вверх, по направлениям к креплениям тросов.
Движение
Упражнение представляет собой сведение рук перед собой, на уровне талии. Во время работы следует сознательно напрягать мышцы груди, и не расслаблять их как можно дольше, разводя руки в стороны по направлению к блочным механизмам.
Все повторы должны выполняться в одинаковой манере, чтобы спортсмен не менял траектории движения. Не допускается углубление наклона спины. Часто пишут, что она должна быть строго под 45 градусов, но это не так, глубина наклона определяется анатомическими особенностями атлета, и не может быть глубже 45 градусов. Так же не допускается прямая вертикальная стойка. В остальном, возможны варианты, которые позволят атлету проработать мышцы более качественно.
Внимание
Есть технические моменты, которых лучше избегать:
- Читинг корпусом. Вы не в видео Плюшевой Бороды, избегайте замахов, так как они могут травмировать плечевые суставы, даже если атлет во время замаха и не чувствует боли и дискомфорта;
- Активные толчки руками. Бодибилдинг тем и отличается от тяжелой атлетики, что любит подконтрольное выполнение упражнений. Толкая вес, мы можем поднять больше, но цель движения не состоит в установлении рекорда зала по блочным тренажерам.
- «Бег» по периметру ногами. Стоит встать один раз так, чтобы положение тела было прочным, и не менять его, так как «пробежки» могут стать причиной потери стабильности плеч, и вызвать травму;
- Кивки головой. Неприятно, когда шею заклинивает во время упражнения. И еще более неприятно, когда это «прекрасное» чувство сопровождается травмой плеча. Потому излишнее напряжение трапеции и кивки надо исключать. Если вам нужно во что бы то ни стало покивать головой, вес выбран неправильно, он слишком большой. Опять же, вес надо подбирать так, чтобы не возникало необходимости совершать дополнительные и лишние движения корпусом и головой.
- «Срыв» на старте. Рывок руками может стать причиной травмы как плечевого, так и локтевого суставов;
- Жестко «вставленные» локти на старте движения. Это может вызвать перерастяжение связок локтевого сустава и стать причиной травмы;
- Постоянное выставление вперед одной и той же ноги может привести к дисбалансам в тазобедренном суставе.
Варианты выполнения
Горизонтальные сведения рук в кроссовере лежа на скамье
Упражнение напоминает всем известную «разводку» с гантелями, только вместо гантелей в руки берутся рукоятки кросовера. Тросы крепятся к нижней части сектора крепления так, чтобы руки атлета не «выворачивало» при приеме стартового положения. Скамья может быть горизонтальной или наклонной, это лишено принципиальной важности. Считается, что на наклонной скамье больше работают грудные, но это субъективно и зависит от телосложения.
Скамья располагается строго по центру, атлет ложится на нее, ассистент подает рукоятки на уровень центра груди. Далее движение напоминает обычную «разводку» с гантелями, руки направляются в стороны, и сводятся к центру на уровне середины груди. Не нужно допускать неестественно большой амплитуды, чтобы не вывихнуть плечевой сустав.
Наклонные сведения
Собственно, напоминают вариант с разножкой, только вставать нужно прямо, и ноги в разножку не ставить. Корпус наклоняется вперед, ручки опускают вниз, грудные мышцы напрягают, работа идет за счет сокращения груди.
Сведение рук в кроссовере с нижнего блока
Это движение требует чуть большей работы со стороны передней дельтовидной. Выполнять упражнение нужно, прикрепив рукоятки к нижней части кроссовера. Затем атлет делает шаг вперед, и выводит ручки на уровень груди. Далее следует механическое сведение ручек на уровне середины груди. Пекторальные мышцы сокращают в точке максимального напряжения.
Сведение рук в кроссовере с верхнего блока: техника выполнения
Watch this video on YouTube
Разбор упражнения
Анатомия упражнения – какие мышцы работают
Основная целевая группа- это нижний пучок грудной мышцы. Как стабилизаторы работают мышцы спины и кора, помогают движению передние дельты, зубчатые мышцы, и малая грудная мышца.
Плюсы
Это полностью изолирующее упражнение. Оно не позволяет включать в работу трицепс, а значит подходит для тех, кто много жмет лежа, и считает жим лежа своим приоритетом. Движение позволяет проработать грудные без особой нагрузки на стабилизаторы и бицепс, позволяет взять более значительную амплитуду, растянуть мышцы так, чтобы сократить их максимально. Упражнение достаточно вариативно, чтобы избежать повышенной нагрузки на локти, плечи, бицепсы. Оно помогает проработать мышцу по всей длине и позволяет не исключать нижний пучок грудной из работы.
Минусы:
- Не все залы оборудованы кроссовером, и не всегда есть к нему доступ. Это популярная машина, она может быть постоянно занята в час пик;
- Движение не может помочь в наращивании мускулатуры, если выполняется только оно. Необходимы базовые упражнения вдобавок к работе в кроссовере
Подготовка к упражнению
Обычно кроссовер не идет первым движением в тренировке, и не используется в качестве упражнения для предварительного утомления мышц груди. Тренировка начинается с базы, и лишь в конце спортсмен подходит к блочному тренажеру, чтобы проработать низ груди.
Это означает, что суставная разминка не нужна, достаточно выполнить пару подходов с небольшим весом.
Правильное выполнение
- Упражнение односуставное – работа идет только в плечевом суставе;
- Читинг и замахи корпусом исключаются;
- Локти в верхней фазе не должны быть задраны к ушам, они находятся в плоскости плеча;
- Мышцы надо сознательно напрягать, как бы «доводя» вес до нужного положения;
- Нельзя закидывать голову назад, смотреть в потолок, следует расслаблять шею и смотреть вперед;
- Нужно использовать устойчивое положение корпуса, лучше всего – стойка в ножницы;
- Работа происходить по эллиптической или дугообразной траектории. «Закидывать руки», сгибая их в локтях, не следует;
- Сведение производится примерно на уровне талии;
- Можно допустить, что атлет использует маленький вес, но нельзя – толчки и рывки по траектории, и расслабленные руки при опускании веса;
- Нужно стараться сознательно исключать работу мышцами трапеции
Сокращение мышц производится на выдохе, выдох на усилии – основное правило при выполнении силовых упражнений.
Ошибки
- «Разные» движения, когда атлет в первом повторении сгибает руки в локтях, во втором – меняет положение корпуса, и ведет вес по-разному;
- Махи корпусом, помогающие в работе с весом;
- Бросание веса;
- Расслабленная и округленная спина;
- «Вставленные» прямые локти
Советы по эффективности движения
Чаще всего бодибилдеры советуют сознательно сокращать грудные в нижней точке. Добиться этого можно за счет небольшой изометрии, а ее, в свою очередь, немного развернув ладони друг к другу в нижней точке упражнения.
Добиться максимальной изоляции, и полностью исключить читинг можно, если встать на колени. Этот вариант исходного положения позволит спортсмену полностью исключить махи корпусом.
Если требуется смещение акцента на верх груди, надо сводить руки выше. Этого можно добиться как изменением угла наклона корпуса, так и изменением крепления.
Если работать «крестообразно», заводя одну руку за другую в нижней части амплитуды, то можно добиться сильного сокращения мышц без изменения амплитуды.
Включение в программу
Это упражнение может быть единственным на грудь, только если речь идет о тренинге женщины с грудными имплантами. Все остальные атлеты должны выполнять движение в конце тренировки, после базовых, и других изолирующих упражнений.
Обычно выполняется в режиме 12-15 повторений в 3-4 сетах, причем разминочный не считается в работу. Упражнение не выполняется с большим весом, потому отдых может быть достаточно коротким, порядка минуты между сетами.
Противопоказания
Единственное противопоказание к этому упражнению – не заживший надрыв или отрыв грудной мышцы. Во всех остальных случаях можно аккуратно выполнять сведения. Если имеется травма вращателя плеча, возможно на некоторое время потребуется полностью исключить нагрузку и на грудь, включая работу в кроссовере.
Чем заменить сведение рук в кроссовере
С точки зрения биомеханики полная замена – это сведение рук с резиновыми эспандерами. Но с точки зрения работы мышц – это неполная замена, так как эспандеры иначе дают сопротивление, нежели блоки. Они позволяют сокращать мышцы сильнее в пиковой точке, но дают возможность расслабиться на опускании веса.
Сведение в кроссовере – классическое упражнение бодибилдинга, и делать его правильно должен каждый атлет.
Сведение рук в кроссовере — как правильно делать, видео техники выполнения — AtletIQ.com
6 минут на освоение. 345 просмотров
AtletIQ — приложение для бодибилдинга
600 упражнений, более 100 программ тренировок на массу, силу, рельеф для дома и тренажерного зала. Это фитнес-револиция!
Общая информация
Тип усилия
ДругоеЖимНетСтатическиеТяга
Вид упражнения
СиловоеРастяжкаКардиоПлиометрическоеStrongmanКроссфитПауэрлифтингТяжелая атлетикаСтрейчингово-силовое упражнениеЙогаДыханиеКалланетика
Тип упражнения
БазовоеИзолирующееНет
Сложность
НачинающийПрофессионалСредний
Целевые мышцы
Вспомогательные мышцы
Плечи
Сведение рук в кроссовере видео
Как делать упражнение
- Отрегулируйте оборудование. Натянутые тросы должны быть закреплены выше вашей головы.
- Займите исходную позицию: встаньте между стойками и в обе руки возьмите концы тросов.
- Сомкните ладони перед собой, немного наклонитесь вперед.
- Слегка согните локти – этот прием позволит избежать напряжения бицепсов.
- На вдохе начинайте разводить руки по обе стороны от туловища до тех пор, пока ваши ладони не окажутся на уровне плеч. Во время выполнения упражнения вы должны почувствовать растяжение в области груди.
- На выдохе вернитесь в исходную позицию. Следите за поведением тросов: они должны двигаться по прежней траектории. На секунду задержитесь в исходном положении, затем продолжите тренировку.
- Выполните упражнение нужное количество раз.
Фото с правильной техникой выполнения
Какие мышцы работают?
При соблюдении правильной техники выполнения упражнения «Сведение рук в кроссовере» работают следующие группы мышц: Грудь, а также задействуются вспомогательные мышцы: Плечи
Вес и количество повторений
Количество повторений и рабочий вес зависит от вашей цели и других параметров. Но общие рекомендации могут быть представлены в виде таблицы:
| Цель | Подходы | Повторений | Вес, %1Rm | Отдых м/у подходами |
|---|---|---|---|---|
| Развитие силы | 2-6 | 1-5 раз | 100-85% | 3-7 мин |
| Набор массы | 3-6 | 6-12 раз | 85-60% | 1-4 мин |
| Сушка, рельеф | 2-4 | 13-25 раз | 60-40% | 1-2 мин |
Сделать тренинг разнообразнее и эффективнее можно, если на каждой тренировке изменять количество повторений и вес снаряда. Важно при этом не выходить за определенные значения!
*Укажите вес снаряда и максимальное количество повторений, которое можете выполнить с этим весом.
Не хотите считать вручную? Установите приложение AtletIQ!
- Электронный дневник тренировок
- Помнит ваши рабочие веса
- Считает нагрузку под вас
- Контролирует время отдыха
Лучшие программы тренировок с этим упражнением
Среди программ тренировок, в которых используется упражнение «Сведение рук в кроссовере» одними из лучших по оценкам спортсменов являются эти программы:
Чем заменить?
Вы можете попробовать заменить упражнение «Сведение рук в кроссовере» одним из этих упражнений. Возможность замены определяется на основе задействуемых групп мышц.
Сведение рук в кроссовере Author: AtletIQ: on Сведение рук в кроссовере — польза упражнения, как правильно выполнять и сколько подходов делать.. Rating: 5
Сведение рук в кроссовере
Сведение рук в кроссовере одно из самых известных изолирующих упражнений для прокачки грудных мышц, но оно прокачивает далеко не всю грудь, как думают многие. Выполнять сведение, вообще, можно под разными углами, от этого угла и будет зависеть, на какую часть грудных мышц будет падать нагрузка. Соответственно, акцентировать нагрузку можно на разных участках грудных мышц, а поскольку упражнение выполняется с небольшим весом, то, по сути, от того, под каким углом атлет выполняет сведение рук в кроссовере, зависит то, какая часть грудных мышц тренируется.
Упражнение не является способом нарастить мышечную массу, но опытные атлеты, со стажем тренировок хотя бы один год, могут включить его в свою программу тренировок. Дело в том, что, чем менее тренирован спортсмен, тем меньший объем работы могут выполнить его мышцы. Именно поэтому первый год следует выполнять только базовые упражнения. Вы, конечно, можете выполнять и больший объем работы, но это приведет к переутомлению, Вы загоните себя в перетренированность и снизите эффективность своих посещений тренажерного зала до нуля.
Работа мышц и суставов
Сведение рук в кроссовере нагружают внешнюю или внутреннюю часть грудных мышц, что зависит оттого, как атлет будет выполнять упражнение. Если упражнение выполняется стоя, то нагрузку получает внешняя часть груди, а если лежа, то внутренняя. Также следует заметить, что при правильной технике нагрузку будет получать и бицепс, который должен снимать нагрузку с локтевого сустава. А вот плечи необходимо зафиксировать и постараться исключить из работы.
При неправильной технике, когда атлет гонится за весом, сведение рук в кроссовере может привести даже к травме локтевого сустава. Но, если атлет делает все правильно, то этого удается избежать. Больше того, даже, когда упражнение выполняется стоя, наклоном вперед полностью снимается нагрузка с позвоночника. Да и , вообще, упражнение не предполагает использования больших тренировочных весов и выполняется в тренажере, поэтому травмироваться очень сложно.
Сведение рук в кроссовере – схема1) Если Вы выполняете упражнение стоя, то Вам следует взять рукоятки кроссовера и встать в исходное положение, немного нагнувшись вперед и подняв локти выше кистей.
2) Не шевеля локтями, сведите руки, чтобы Ваши ладони пересеклись, после чего вернитесь в исходную точку.
3) Если Вы выполняете упражнение лежа, то Вам понадобится скамейка, которую Вы должны поставить посередине тренажера.
4) Лягте на скамейку, предварительно взяв в руки рукоятки тренажера, а затем начните их сводить и разводить так, как будто Вы делаете разводку гантелей.
Сведение рук в кроссовере – примечания
1) Выполняя упражнение лежа лучше всего пользоваться помощью напарника, который будет Вам подавать рукоятки тренажера.
2) Локти во время сведения рук в кроссовере всегда должны быть зафиксированы, что поможет изолировать трицепс и снять нагрузку с локтей.
3) Опять таки, выполняя сведение лежа, ноги лучше всего держать на полу, плотно опираясь пятками, что обеспечит лучшую устойчивость.
4) Голова в обоих случаях должна находиться в одном положении и смотреть вперед, не отрывайте её от скамьи, или не опускайте вниз.
5) Старайтесь увеличивать амплитуду движения, что поможет лучше задействовать те участки грудных мышц, которые обычно не получают нагрузку.
Сведение рук в кроссовере позволяет растянуть грудь, заменив разводку гантелей, но, в отличие от разводки, выполняя это упражнение лежа, атлет получает возможность лучше проработать внутреннюю часть грудных мышц. Грудь является большой мышечной группой, поэтому у неё сложно своровать нагрузку, но, если у Вас эта часть тела является отстающей, то сведение рук в кроссовере могут быть очень полезны.
С другой стороны упражнение формирующее, к тому же ещё и выполняется в тренажере, что не позволяет эффективно прогрессировать нагрузку. Но зато упражнение практически полностью безопасно для суставов. Именно такие характеристики сведения рук в кроссовере делают это упражнение незаменимым во время травмы, а также неплохо подходят тем атлетам. Которые пока не научились чувствовать свои грудные мышцы, из-за чего те недополучают нагрузку во время более комплексных упражнений.
Другие упражнения
Сведение рук в кроссовере | Блог Stronger.pro
Выполняется только в кроссовере. По возможности используйте маленькие рукояти, в которых трос находится как можно ближе к ладоням. Это благоприятно сказывается на биомеханике упражнения. Сведения становятся более дугообразными, а это вовлекает грудные мышцы более существенно.
Если ваш кроссовер многофункционален и высота стоек регулируется, то рекомендуем поставить на уровне шеи или глаз. Работая с максимальной высоты блоков, вам придется наклоняться больше, а при наклоне грудные работают хуже. Поэтому рекомендуется спустить тросовые стойки на 1-2 пункта ниже, чтобы наклон торса был минимальным. Кроме того, это обезопасит ваши плечевые суставы, которые после отказных сетов часто получают чрезмерную нагрузку из-за вертикального натяжения тросов. Поэтому атлеты стараются создать единую рабочую плоскость в которой движется трос и ваши руки.
Техника выполнения
Стартовое положение
Схватите рукояти верхних блоков кроссовера. Согните руки в локтях. Сделайте 1-1.5 шага вперед, чтобы передняя нога немного вышла за плоскость тренажера. Выгните позвоночник, чтобы грудные мышцы натянулись по грудной клетке. Слегка наклоните торс вперед так, чтобы при сведении рук трос и предплечья создавали одну прямую линию.
Взгляд направьте вперед. Желательно – в зеркало. Статически напрягите грудь, чтобы вес блоков не тянул плечевые суставы. Ноги в разножку (одна впереди, другая сзади).
Основное движение
После глубокого вдоха мощным, но подконтрольным усилием начните сводить руки. Старайтесь сближать не рукоятки тренажера друг к другу, а локтевые суставы. В конце движения можете разогнуть руки. Да, это создаст нагрузку на трицепс, но в то же время более существенно сократит грудные мышцы за счет полноценного сведения.
В критической точке дополнительно задержитесь на пару секунд. Основное движение выполняется на выдохе.
Обратное движение
Медленно начните отводить плечи (область с бицепсом и трицепсом) назад. Не позволяйте блочному тренажеру выполнять эту фазу за вас. Сводите лопатки и слегка поднимайте грудную клетку. Мышечные ткани должны растянуться, чтобы следующее повторение обладало максимальным силовым потенциалом. Однако не выворачивайте плечи сверхмеры.
Критическая обратная точка идентична разведениям рук с гантелями. Не задерживайтесь в ней. Сразу же приступайте к новому повторению. Чрезмерное натяжение плеч не ведет ни к чему хорошему. Наша задача – тренинг груди.
Нюансы и хитрости
Одна из главных хитростей кроется в психологической установке, с которой вы выполняете сведение рук. Мысленно нужно представить, как пытаетесь обнять широкое дерево. Благодаря такой простой хитрости ваши руки будут двигаться по верной траектории. В ином случае вы будете акцентировать свое внимание на сближении рукоятей и соответствующем жимовом движении, а от вас требуется сведение рук.
По возможности выбирайте маленькие рукояти. Обычно в тренажерных залах 2-3 варианта. Чем меньше рукоятка, тем лучше биомеханика упражнения. Иначе вам придется подворачивать кисти, а это негативно сказывается на технике выполнения.
Ошибки
Главная ошибка, которая встречается повсеместно – неверно подобранный рабочий вес. Запомните: сведения в кроссовере – это не аналог разведениям и сведениям рук с гантелями. Работа в тренажере нужна для точечной нагрузки грудных мышц по фиксированной траектории.
С гантелями вы можете рывком и читингом поднять их наверх. С тренажером сделать это не получится. Сила трения и конструкция станка не позволят читинговать в положительном смысле этого слова. Единственный вариант – наклонять корпус, превращая сведения рук в наклоны корпуса на подобии гиперэкстензий и гудморнингов.
Подбирайте минимальный рабочий вес, который позволяет качественно и технически верно выполнять заданное количество повторений. Пусть это будет 1 плитка, или даже ноль. Главное в данном упражнении – техника выполнения.
Только тогда вы почувствуете работу грудных мышц. Не забывайте обо всех нюансах техники, и важность рабочего веса сразу же отойдет на второй план. Нейромышечная иннервация сделает свое дело.
Перекрестная мутация — обзор
5.3 Роль генетических операторов
Как было сказано ранее, у генетических алгоритмов есть три основных генетических оператора: кроссовер, мутация и отбор. Их роли могут быть самыми разными.
- •
Кроссовер . Замена частей решения другим в хромосомах или представлениях решения. Основная роль заключается в обеспечении перемешивания решений и сходимости в подпространстве.
- •
Мутация .Изменение частей одного решения случайным образом, что увеличивает разнообразие популяции и обеспечивает механизм выхода из локального оптимума.
- •
Выбор наиболее приспособленных, или элитарность . Использование решений с высокой степенью пригодности для передачи следующим поколениям, что часто осуществляется в форме отбора лучших решений.
Очевидно, что в реальных алгоритмах взаимодействия между этими генетическими операторами очень усложняют поведение.Однако роль отдельных компонентов остается прежней.
Кроссовер — это в основном экшен с подпространством. Этот момент становится понятным для двоичной системы, в которой строки состоят из a и b. Например, для двух строк S1 = [aabb] и S2 = [abaa], какими бы ни были действия кроссовера, их потомки всегда будут в форме [a…]. То есть кроссовер может привести только к решениям в подпространстве, где первым компонентом всегда является a. Более того, два идентичных решения приведут к двум идентичным потомкам, независимо от того, как был применен кроссовер.Это означает, что кроссовер работает в подпространстве, и конвергентные решения / состояния останутся конвергентными.
С другой стороны, мутация обычно приводит к решению вне подпространства. Для предыдущего примера, если мутация происходит в первом a и переходит в b, то решение S3 = [babb] не принадлежит предыдущему подпространству. Фактически, мутация обычно порождает решения, которые могут быть дальше от текущих решений, таким образом увеличивая разнообразие популяции. Это позволит населению вырваться из локального оптимума.
Одним из важных вопросов является случайный отбор среди населения. Например, кроссовер требует наличия двух родителей в популяции. Выбираем ли мы их случайно или склоняемся к решениям, которые лучше подходят? Один из способов — использовать колесо рулетки для выбора; другой — использовать выбор, пропорциональный фитнесу. Очевидно, существуют и другие формы отбора, в том числе линейный рейтинг, турнирный выбор и другие.
И кроссовер, и мутация работают без использования знания цели или среды пригодности.С другой стороны, отбор наиболее приспособленных, или элитарность, действительно использует среду пригодности для определения того, что выбрать, и, таким образом, влияет на поисковое поведение алгоритма. Что выбирается и как выбираются решения, зависит от алгоритма, а также от значений целевой функции. Эта элитарность гарантирует, что лучшие решения должны выжить среди населения. Однако очень сильная элитарность может привести к преждевременной конвергенции.
Стоит отметить, что эти генетические операторы являются фундаментальными.Другие операторы могут принимать разные формы, также могут работать гибридные операторы. Однако, чтобы понять базовое поведение генетических алгоритмов, мы сосредоточимся на этих ключевых операторах.
Введение
Введение Эволюционные алгоритмы (ЭА) — это поисковые методы общего назначения. Процесс отбора и операторы кроссовера и мутации установить баланс между разведкой и эксплуатацией пространство поиска, подходящее для самых разных задач решение которых представляет трудности, неразрешимые с помощью классические методы.Большинство этих проблем определяется в непрерывном области, поэтому применяемые эволюционные алгоритмы используют реальные значения, а именно, эволюционные стратегии (EP), реальные генетические алгоритмы (RCGA) и эволюционное программирование (EP). Для этих парадигм точность решения не зависит от системы кодирования, как в двоично-кодированные генетические алгоритмы, но на точности компьютера система, в которой выполняются алгоритмы.Процесс выбора направляет поиск в регионы лучшие люди.Оператор мутации изменяет случайным образом с помощью заданная вероятность, один или несколько генов хромосомы, таким образом увеличивая структурное разнообразие населения. Как видим, это явно оператор разведки, который помогает восстановить генетический разнообразие, утраченное на этапе выбора, и поиск новых решений избегая преждевременного схождения. Таким образом, вероятность достижение заданной точки в пространстве поиска никогда не равно нулю. Этот оператор, по сути, реализует случайный поиск, хорошо изученный функции полезны в области эволюционных вычислений.
Оператор кроссовера объединяет гены двух или более родителей, чтобы производить лучшее потомство. В его основе лежит идея о том, что биржа информации между хорошими хромосомами будет генерироваться еще лучше потомство. Эффект от оператора кроссовера можно изучить из две разные точки зрения: на уровне хромосом и на уровне генов. Эффект оператора кроссовера на уровне хромосомы может быть рассматривается геометрическим способом. Учитывая двух родителей а также с двумя генами, мы обозначим через гиперкуб, определяемый их генами (Рисунок 1а).На уровне гена репрезентация будет линейный, определяющий в данном случае отрезок или интервал для каждой пары генов (рис. 1б). Большинство операторов кроссовера генерируют людей в зоны эксплуатации, или же . Таким образом, оператор кроссовера реализует поиск по глубине или эксплуатации, оставив поиск по ширине или поиск оператора мутации.
Эта политика, интуитивно очень естественная, заставляет население сближаться. к значениям внутри гиперкубов, определенных их родителями, производя быстрое сокращение разнообразия населения, которое может привести к преждевременная сходимость к неоптимальному решению.Недавние исследования по BLX- кроссовер [ES93], кроссовер на основе нечеткого связки [HHVLV94] и нечеткая рекомбинация [VMC95], подтвердили хорошую производительность тех операторов кроссоверов, которые также генерировать людей в зоне разведки. Эти операторы избежать потери разнообразия и преждевременного сближения с внутренним точки пространства поиска, но также и генерация новых людей в зоне разведки может замедлить процесс поиска. За это причина, оператор кроссовера должен установить адекватный баланс между разведкой (или интерполяцией) и эксплуатацией (или экстраполяция), и произвести потомство в исследовании и зоны эксплуатации в правильной пропорции.
Установление баланса между разведкой и разработкой важно, но также важно, чтобы такой баланс был самоадаптивный [Kit01, BD01, DB01], что то есть, он должен гарантировать, что разброс потомства зависит от рассеяние родителей.Итак, два близких родителя должны произвести близкое потомство, а два дальних родителя должны порождать дальние потомство. Контроль дисперсии в кроссовере на основе нечеткого связки основаны на порождении потомства с помощью нечетких связки т -нормы, т -конормы, средние функции и обобщенный оператор компенсации [Miz89]. В нечетком рекомбинация потомство генерируется с помощью двух треугольных распределения, средние значения которых происходят от каждого из генов двух родители.В BLX- у нас есть такая же вероятность генерации потомство между родителями и в районе, близком к родителям амплитуда которого модулируется параметром.
Оно и Кобаяши [OK97] предложили унимодальный транспорт. Распределенный кроссовер (UNDX), где три родителя используются для генерации двое и более детей. Детки получаются с помощью эллипсоидальной распределение, где одна ось — это сегмент, соединяющий двух родителей и степень ортогонального направления определяется перпендикулярное расстояние третьего родителя от оси.Авторы утверждают, что этот оператор должен сохранять статистику Население. Этот кроссовер тоже самоадаптивный, но отличается от BLX — тем, что более вероятно сгенерировать потомство близко к среднему от первых двух родителей.
Еще один самоадаптивный кроссовер — Simulated Binary Crossover. (SBX) [DA95]. Основываясь на особенностях поиска одноточечного кроссовер, используемый в генетических алгоритмах с двоичным кодом, этот оператор уважает интервальную обработку схем в том смысле, что интервальные схемы родителей сохраняются в потомстве.В Кроссовер SBX делает упор на создание потомства рядом с родители. Итак, кроссовер гарантирует, что степень детей пропорциональна степени родителей, а также способствует тому, что близких к родительским особям монотонно чаще выбирают в качестве дети, чем люди, далекие от родителей.
Основная цель данной статьи — предложить оператор кроссовера, который позволяет избежать потери разнообразия популяции особей, а при в то же время способствует скорости сходимости алгоритма.Эти две цели сначала противоречат друг другу; их адекватный баланс контролируется двумя основными функциями оператора кроссовера: i) баланс между разведкой и разработкой и, ii) самонастраивающийся компонент. Эти две особенности делают эволюционный алгоритмы избегают преждевременной сходимости и поддерживают локальную точную настройку. Оба атрибута высоко ценятся в любом поисковом алгоритме.
У большинства современных кроссоверов особенности потомства зависят от особенностей всего нескольких родителей.Эти кроссоверы не учитывать особенности населения, такие как локализация и рассеяние особей. Использование этих статистических функций населения может помочь сближению населения глобальный оптимум.
Оператор кроссовера в основном реализует глубинный или эксплуататорский поиск, как и другие методы, такие как крутой градиентный спуск, локальный поиск или имитация отжига, но в этих трех методах поиска алгоритм учитывает качество решений.Так что Резонно думать, что для кроссовера это тоже удобно оператора, чтобы рассмотреть эффективность лиц, участвующих в операция кроссовера. Эта идея уже реализована некоторыми эвристические кроссоверы [Wri91].
Тем не менее, следуя предыдущей аргументации, кажется, что плохо, чтобы использовать только двух родителей, и не рассматривать наиболее многообещающие направления, по которым желательно вести поиск.То есть вместо использования локальной эвристики, в которой используются два человека, вовлечение всего населения или адекватного подмножества в определение направления поиска, особенности которого будут особенно подходит.
Руководствуясь этой аргументацией, в этой статье мы предлагаем оператор кроссовера, который будет называться Confidence Interval Кроссовер на основе Norm (CIXL2). С одной стороны, требуется преимущество селективного компонента, полученного из извлечение черт лучших особей населения, и это указывает направление поиска, и на с другой стороны, он делает самоадаптивную выборку вокруг этих функций. ширина которого зависит от количества лучших особей, разброс лучшие люди, коэффициент уверенности и локализация лица, участвующие в кроссовере.Теперь область эксплуатации — это не область между двумя родителями, которые участвует в кроссовере, но область определяется уверенностью интервал, построенный из лучших особей популяции; а также область исследования — это остальная часть области поиска. К предыдущие концепции разведки и эксплуатации, чисто геометрические, добавлен вероятностный компонент, зависящий от популяции особенности лучших личностей.
Оценка алгоритмов распределения (EDA) или вероятностных Эволюционные алгоритмы построения моделей [MP98, MMR99] основаны на, казалось бы, схожей идее.Эти алгоритмы не имеют операторов мутации и кроссовера. После каждого генерации распределение популяции отобранных особей составляет оценены и получены новые особи, отобранные из этого оценочного распределение. Однако в основе нашего кроссовера лежит идея извлечение характеристик совокупности, среднего и стандартного отклонения, в чтобы обнаружить регионы, где существует большая вероятность получение лучших людей. Чтобы выполнить кроссовер, мы создать трех виртуальных родителей, которые представляют собой оценщик локализации среднее и границы доверительного интервала, из которого с с определенной степенью уверенности, этот оценщик локализации принимает значения.Таким образом, дети, рожденные от этих трех родителей унаследует черты лучших особей населения.
Остальная часть статьи организована следующим образом: Раздел 2 объясняет определение CIXL2 и его характеристик; В разделе 3 обсуждается проблема. выбора тестовых наборов, и оправдывает использование тестового набора основан на предложении Эйбена и Бка [EB97a]; Раздел 4 описывает экспериментальная установка эволюционного алгоритма (RCGA), использованная в тестах; Раздел 5 исследует оптимальные значения параметров CIXL2; В разделе 6 сравнивается производительность CIXL2 с другими кроссоверами; Раздел 7 сравнивает CIXL2 с EDA; Раздел 8 описывает применение RCGA с CIXL2 к ансамблям нейронных сетей; а также, наконец, в разделе 9 излагаются выводы нашей статьи и будущее направления исследований.
Доминго 2005-07-11MACD и стохастик: стратегия двойного пересечения
Спросите любого технического трейдера, и он скажет вам, что правильный индикатор необходим, чтобы эффективно определять изменение курса в ценовых моделях акции. Однако все, что один «правильный» индикатор может сделать, чтобы помочь трейдеру, два совместимых индикатора могут сделать лучше.
Эта статья призвана побудить трейдеров искать и идентифицировать одновременное бычье пересечение MACD вместе с бычьим стохастическим пересечением и использовать эти индикаторы в качестве точки входа в торговлю.
Ключевые выводы
- Технический трейдер или исследователь, ищущий дополнительную информацию, может получить больше пользы от объединения стохастического осциллятора и MACD, двух дополнительных индикаторов, чем просто глядя на один.
- По отдельности, два индикатора работают в разных технических помещениях и работают по отдельности; по сравнению со стохастиком, который игнорирует рыночные колебания, MACD является более надежным вариантом в качестве единственного торгового индикатора.
- Однако стохастик и MACD представляют собой идеальную пару и могут обеспечить улучшенный и более эффективный опыт торговли.
Сопряжение стохастика и MACD
Поиск двух популярных индикаторов, которые хорошо работают вместе, привел к объединению стохастического осциллятора и расхождения конвергенции скользящих средних (MACD). Эта команда работает, потому что стохастик сравнивает цену закрытия акции с ее ценовым диапазоном в течение определенного периода времени, а MACD — это формирование двух скользящих средних, расходящихся и сходящихся друг с другом. Эта динамическая комбинация очень эффективна, если используется в полной мере.
Работа со стохастиком
История стохастического осциллятора полна противоречий. Большинство финансовых ресурсов идентифицируют Джорджа С. Лейна, технического аналитика, изучавшего стохастику после того, как он присоединился к Investment Educators в 1954 году, как создателя стохастического осциллятора. Лейн, однако, сделал противоречивые заявления об изобретении стохастического осциллятора. Возможно, его создал тогдашний глава инвестиционных педагогов Ральф Дистант или даже неизвестный родственник из кого-то в организации.Взаимодействие с другими людьми
Группа аналитиков, скорее всего, изобрела осциллятор в период между приходом Лейна в Инвестиционные педагогические компании в 1954 и 1957 годах, когда Лейн заявил о своих правах на него.
Стохастический осциллятор состоит из двух компонентов:% K и% D. % K — это основная линия, указывающая количество периодов времени, а% D — это скользящее среднее% K.
Понимание того, как формируется стохастик, — это одно, но более важно знать, как он будет реагировать в различных ситуациях.Например:
- Обычные триггеры возникают, когда линия% K опускается ниже 20 — акция считается перепроданной, и это сигнал на покупку.
- Если% K достигает пика чуть ниже 100 и направляется вниз, акции должны быть проданы до того, как это значение упадет ниже 80.
- Обычно, если значение% K поднимается выше% D, то это пересечение указывает на сигнал покупки, при условии, что значения ниже 80. Если они выше этого значения, ценная бумага считается перекупленной.
MACD и стохастик: стратегия двойного пересечения
Работа с MACD
Как универсальный торговый инструмент, который может выявить динамику цены, MACD также полезен для определения ценовых тенденций и направления.Индикатор MACD обладает достаточной силой, чтобы работать автономно, но его предсказательная функция не является абсолютной. При использовании с другим индикатором MACD действительно может увеличить преимущество трейдера.
Если трейдеру необходимо определить силу тренда и направление акции, очень полезно наложение его линий скользящего среднего на гистограмму MACD. MACD также можно рассматривать только как гистограмму.
Расчет MACD
Чтобы ввести этот осциллирующий индикатор, который колеблется выше и ниже нуля, требуется простой расчет MACD.При вычитании 26-дневной экспоненциальной скользящей средней (EMA) цены ценной бумаги из 12-дневной скользящей средней ее цены в игру вступает значение осциллирующего индикатора. После добавления триггерной линии (девятидневной EMA) их сравнение создает торговую картину. Если значение MACD выше девятидневной EMA, это считается пересечением бычьих скользящих средних.
Полезно отметить, что есть несколько хорошо известных способов использования MACD:
- Прежде всего, это наблюдение за расхождениями или пересечением центральной линии гистограммы; MACD показывает возможности покупки выше нуля и возможности продажи ниже.
- Другой отмечает пересечения линии скользящего среднего и их отношение к центральной линии.
Интеграция бычьих кроссоверов
Чтобы понять, как интегрировать бычье пересечение MACD и бычье стохастическое пересечение в стратегию подтверждения тренда, необходимо объяснить слово «бычий». Проще говоря, «бычий» относится к сильному сигналу о непрерывном росте цен. Бычий сигнал — это то, что происходит, когда более быстрая скользящая средняя пересекает более медленную скользящую среднюю, создавая рыночный импульс и предлагая дальнейший рост цен.
- В случае бычьего MACD это произойдет, когда значение гистограммы выше линии равновесия, а также когда линия MACD имеет большее значение, чем девятидневная EMA, также называемая «сигнальной линией MACD».
- Бычья дивергенция стохастика возникает, когда значение% K проходит через% D, подтверждая вероятный разворот цены.
Кроссоверы в действии: Genesee & Wyoming Inc.
Ниже приведен пример того, как и когда использовать двойное пересечение стохастика и MACD.
Обратите внимание на зеленые линии, показывающие, когда эти два индикатора двигались синхронно, и на почти идеальное пересечение, показанное в правой части графика.
Изображение Сабрины Цзян © Investopedia 2020Вы можете заметить пару случаев, когда MACD и стохастик близки к одновременному пересечению: например, январь 2008 года, середина марта и середина апреля. Даже похоже, что они пересекались одновременно на диаграмме такого размера, но если вы присмотритесь, вы обнаружите, что на самом деле они не пересекались друг с другом в течение двух дней, что было критерием для настройки этого сканировать.Вы можете изменить критерии, включив в них крестики, которые происходят в более широком временном интервале, чтобы вы могли фиксировать движения, подобные показанным ниже.
Изменение параметров настроек может помочь создать продолжительную линию тренда, что поможет трейдеру избежать резких движений. Это достигается за счет использования более высоких значений в настройках интервала / периода времени. Это обычно называют «сглаживанием». Активные трейдеры, конечно, используют гораздо более короткие таймфреймы в настройках своих индикаторов и будут ссылаться на пятидневный график вместо графика с месячной или летней историей цен.
Стратегия
Во-первых, обратите внимание на то, чтобы бычьи пересечения произошли в пределах двух дней друг от друга. При применении стратегии двойного пересечения стохастика и MACD в идеале пересечение происходит ниже 50-линии стохастика, чтобы поймать более длительное движение цены. И желательно, чтобы значение гистограммы уже было или переместилось выше нуля в течение двух дней после размещения вашей сделки.
Также обратите внимание, что MACD должен немного пересекаться после стохастика, поскольку альтернатива может создать ложное указание на ценовой тренд или поместить вас в боковой тренд.
Наконец, безопаснее торговать акциями, превышающими их 200-дневные скользящие средние, но это не является абсолютной необходимостью.
Особые соображения
Преимущество этой стратегии в том, что она дает трейдерам возможность продержаться в поисках лучшей точки входа для акций с восходящим трендом или быть более уверенными в том, что любой нисходящий тренд действительно разворачивается, когда ловится на дно для долгосрочных удержаний. Эту стратегию можно превратить в сканирование, если это позволяет программное обеспечение для построения графиков.
При каждом преимуществе любой стратегии всегда есть и недостаток.Поскольку акция обычно занимает больше времени, чтобы занять лучшую позицию для покупки, фактическая торговля акцией происходит реже, поэтому вам может потребоваться большая корзина акций для наблюдения.
Двойное пересечение стохастика и MACD позволяет трейдеру изменять интервалы, находя оптимальные и последовательные точки входа. Таким образом, его можно адаптировать к потребностям как активных трейдеров, так и инвесторов. Поэкспериментируйте с обоими интервалами индикатора, и вы увидите, как пересечения будут выстраиваться по-разному, а затем выберите количество дней, которое лучше всего подходит для вашего стиля торговли.Вы также можете добавить в эту смесь индикатор индекса относительной силы (RSI), просто для удовольствия.
Что такое расхождение сходимости скользящих средних? Определение расхождения схождения скользящих средних, расхождения схождения скользящих средних Значение
Определение: Дивергенция схождения скользящих средних, или MACD, является одним из самых популярных инструментов или индикаторов импульса, используемых в техническом анализе. Он был разработан Джеральдом Аппелем в конце 1970-х годов. Этот индикатор используется для понимания импульса и его направленности путем вычисления разницы между двумя интервалами временных периодов, которые представляют собой набор исторических временных рядов.В MACD используются « скользящие средние » двух отдельных временных интервалов (чаще всего это делается по историческим ценам закрытия ценной бумаги), а линия осциллятора импульса достигается путем взятия разницы двух скользящих средних, которая также обозначается как «расхождение». Простое правило использования двух скользящих средних состоит в том, что одно должно иметь более короткий период времени, а другое — более длительный период времени. Обычно для этой цели используются экспоненциальные скользящие средние (EMA).Описание: Основными точками индикатора MACD являются:
a) Период времени или интервал, который может определить пользователь.Обычно используемые периоды времени:
Краткосрочные интервалы — 3, 5, 7, 9, 11, 12, 14, 15-дневные интервалы, но более популярны 9-дневные и 12-дневные интервалы
Долгосрочные интервалы — 21, 26, 30, 45, 50, 90, 200-дневные интервалы; 26-дневные и 50-дневные интервалы более популярны
b) Линия импульсного осциллятора или дивергенция или линия MACD — это может быть простое построение «расхождения» или разницы между двумя скользящими средними интервалами
c) Сигнальная линия — экспоненциальная скользящее среднее данных расхождения e.грамм. 9-дневная EMA
d) Обычно используется комбинация 12-дневной и 26-дневной EMA цен и 9-дневной EMA данных дивергенции, но эти значения могут быть изменены в зависимости от торговой цели и факторов
e) Приведенные выше данные затем наносятся на график, где ось X — время, а ось Y — цена, чтобы получить линию MACD, сигнальную линию и гистограмму для разницы между MACD и сигнальной линией, которая показана под X -axis
Пример:
Возьмите 12-дневную и 26-дневную экспоненциальные скользящие средние цены закрытия ценной бумаги.Чтобы вычислить экспоненциальную скользящую среднюю цен закрытия, вам необходимо выполнить взвешенный расчет простых скользящих средних, где необходимо вычислить взвешивающий множитель. Для расчета обратитесь к концепции экспоненциальной скользящей средней. Затем будет взята разница данных EMA и использована для построения линии MACD для указанной продолжительности и построена в виде линейного графика. Эта область находится под осью времени и делится осью 0 или называется центральной линией, чтобы отображать отрицательные и положительные стороны. Затем девятидневная EMA будет рассчитана для данных MACD таким же образом, как указано выше, что называется «сигнальной линией».Затем гистограмма или гистограмма рисуется в той же области, где длина столбца показывает изменение движения линии MACD и сигнальной линии в одной точке. Вот скриншот того же самого, когда он нанесен на график.
50915432
Источник — http://economictimes.indiatimes.com/markets/technical-chartsMACD и сигнальная линия движутся выше и ниже нулевой оси или центральной линии, сигнализируя о тенденции, такой как условия перекупленности и перепроданности. Когда точки EMA расположены близко друг к другу, это называется конвергенцией, а когда они разнесены, это называется расхождением.Чем короче скользящая средняя, тем сильнее реакция линии MACD. Есть три способа интерпретации MACD:
Вот некоторые из указаний MACD и их значения: —
1) Пересечение сигнальной линии: сигнальная линия — это EMA линии MACD. Таким образом, он следует за средней линией и помогает определить развороты MACD. Когда MACD пересекает разворот выше сигнальной линии, это указывает на бычий настрой и называется бычьим пересечением. Если он поворачивает ниже сигнальной линии, это называется медвежьим пересечением.
2) Пересечение центральной линии: когда MACD пересекает разворот выше нулевой линии, это указывает на бычий настрой и называется бычьим пересечением центральной линии. Если он поворачивает ниже нулевой линии, это медвежье пересечение центральной линии. Положительное пересечение происходит, когда более короткая EMA базовой ценной бумаги перемещается выше более длинной EMA.
3) Дивергенция: показывает точку, в которой MACD отклоняется и не следует за действием цены. Когда цена касается нового минимума, но MACD не подтверждает этого, создавая новый минимум, это считается бычьей дивергенцией.В то время как при медвежьей дивергенции цена достигает нового максимума, но MACD не делает нового максимума самостоятельно. Точки расхождения могут указывать на незначительные сдвиги в ценной бумаге.
Некоторые другие важные моменты:
· Индикатор MACD следует использовать при наличии правильного тренда. Это не работает на рынке с ограниченным диапазоном.
· Длинные столбцы на гистограмме показывают расхождение, в то время как короткие столбцы показывают конвергенцию скользящих средних
· MACD имеет положительный импульс, когда более короткая EMA движется выше более длинной, но когда она движется ниже более длинной EMA, это сигнализирует об отрицательном импульсе .
· Когда MACD значительно повышается и короткая EMA вытягивается из более длинной, это сигнализирует о состоянии перекупленности.
· Могут быть ложные сигналы и от MACD. Например, может быть пересечение бычьей сигнальной линии, но резкое снижение цены ценной бумаги.
Точно так же может иметь место отрицательное пересечение, но резкое повышение цены базового актива. Таким образом, событие необходимо рассматривать в течение более длительного времени для подтверждения.
Источник YouTube канал: Specialist Share Education
— Руководство по расхождению схождения скользящих средних
Что такое осциллятор MACD?
Осциллятор расхождения сходимости скользящих средних (MACD) — один из самых популярных и широко используемых индикаторов технического анализа трейдеров. Трейдер акциями. Трейдер акциями — это тот, кто участвует в покупке и продаже акций компании на фондовом рынке.Подобно тому, кто инвестирует в рынки заемного капитала, трейдер инвестирует в рынки акционерного капитала и обменивает свои деньги на акции компании, а не в облигации. Карьера в банке — высокооплачиваемая и высокооплачиваемая аналитика. Руководство для аналитиков Trifecta®. Полное руководство о том, как стать финансовым аналитиком мирового уровня. Вы хотите быть финансовым аналитиком мирового уровня? Вы хотите следовать передовым отраслевым практикам и выделиться из толпы? Наш процесс, называемый аналитиком Trifecta®, состоит из аналитики, презентаций и использования мягких навыков для измерения динамики рынков.
Трейдеры и аналитики используют различные технические индикаторы Осциллятор MACD — Технический анализ Осциллятор MACD используется для изучения схождения и расхождения краткосрочных скользящих средних. Осциллятор MACD — это обоюдоострый технический индикатор, который предлагает трейдерам и аналитикам возможность отслеживать тенденции на рынке, а также измерять динамику изменения цен. для выявления тенденций на рынке, прогнозирования потенциальных сдвигов в торговле и, в конечном итоге, либо для успешной торговли самим, либо для предоставления рекомендаций клиентам, чтобы они могли успешно торговать.
Что такое MACD?
Популярность индикатора MACD может быть напрямую связана с его способностью вычислять и указывать на быстрое краткосрочное увеличение или уменьшение импульса.
Джеральд Аппель разработал дивергенцию конвергенции скользящих средних во второй половине семидесятых годов. Хотя название кажется длинным и сложным, это один из наименее сложных индикаторов для реального расчета и практического применения.
Дивергенция схождения скользящих средних использует два разных индикатора отслеживания тренда — скользящие средние — и создает на их основе импульсный осциллятор, вычитая скользящее среднее более длительного периода времени из скользящего среднего более короткого периода времени.В некотором смысле это делает MACD обоюдоострым техническим индикатором, поскольку он предлагает трейдерам и аналитикам возможность отслеживать тенденции на рынке, а также измерять динамику изменения цен.
Рассчитанные скользящие средние неизбежно сходятся, пересекаются друг с другом, а затем расходятся или удаляются друг от друга, заставляя MACD прыгать за нулевую линию и под ним. Затем трейдеры могут наблюдать за этими сигнальными пересечениями и расхождениями, чтобы помочь им определить меняющиеся рыночные тенденции, будь то бычьи или медвежьи.Иногда объяснение MACD словами сбивает с толку. Взгляните на картинку ниже.
Подробнее на https://www.metastock.com/
Как рассчитывается MACD?
На рисунке выше ясно показано, как краткосрочные и долгосрочные скользящие средние сближаются (сходятся), расходятся (расходятся) и пересекаются друг с другом. MACD отражает изменение отношения краткосрочных экспоненциальных скользящих средних к долгосрочным экспоненциальным скользящим средним.
Уравнение, используемое для расчета MACD, выглядит следующим образом:
(12-дневная EMA — 26-дневная EMA) = MACD
Трейдеры и аналитики обычно используют цены закрытия для 12-дневных и 26-дневных периодов времени, чтобы генерировать EMA, используемые для расчета расхождения сходимости скользящих средних. После этого 9-дневная скользящая средняя для самой линии MACD затем строится рядом с индикатором, чтобы служить сигнальной линией, которая поможет осветить, когда рынок может разворачиваться.
На рисунке выше четко показаны линия расхождения конвергенции скользящих средних, сигнальная линия, а также гистограмма MACD, которая представляет разницу между 9-дневной скользящей средней и MACD. Когда линия осциллятора MACD пересекает 9-дневную среднюю (сигнальная линия), гистограмма считается положительной (выше нулевой линии, указанной в правой части окна MACD). И наоборот, гистограмма отрицательная, когда MACD опускается ниже сигнальной линии.
Как мы упоминали ранее, значения с 12 и 26 периодами являются обычно используемыми настройками для расчета MACD. Изменения в периоды времени, используемые для расчета, могут быть внесены в соответствии с требованиями трейдера. Торговец акциями. Трейдер акциями — это тот, кто участвует в покупке и продаже акций компании на фондовом рынке. Подобно тому, кто инвестирует в рынки заемного капитала, трейдер инвестирует в рынки акционерного капитала и обменивает свои деньги на акции компании, а не в облигации.Карьера в банке — это высокооплачиваемые конкретные торговые цели или их особый стиль торговли.
Как интерпретировать MACD?
Как мы уже говорили, MACD основан на движении — движении скользящих средних либо навстречу друг другу (конвергенция), либо друг от друга (расхождение). Индикатор расхождения схождения скользящих средних колеблется или колеблется над и под нулевой линией, также известной как центральная линия. Это колебание представляет собой пересечение, которое сигнализирует трейдерам о том, что более короткая скользящая средняя пересекла путь более длинной.
MACD считается положительным, когда 12-дневная скользящая средняя пересекает 26-дневную среднюю. По мере того, как краткосрочная скользящая средняя расходится и движется все дальше и дальше от долгосрочной, положительные значения дивергенции схождения скользящих средних увеличиваются. Это свидетельствует о нарастании восходящего импульса. Имея это в виду, нетрудно понять, что, когда происходит обратное, 12-дневное среднее опускается ниже 26-дневного среднего, осциллятор становится отрицательным, и по мере того, как более краткосрочная скользящая средняя движется все дальше вниз от более длинной. -срочная скользящая средняя указывает на усиление нисходящего импульса.
Пересечение сигнальной линии
Пересечение сигнальной линии линией схождения скользящих средних является одним из основных сигналов индикатора. Сигнальная линия, как мы уже рассмотрели, является 9-дневной скользящей средней самой линии MACD. Сигнальная линия — это оценочная оценка движения осциллятора, которая делает бычьи и медвежьи повороты MACD более заметными.
Когда трейдер видит, что дивергенция схождения скользящих средних поворачивает на север, пересекает сигнальную линию и продолжается или остается выше нее, бычий бычий и медвежий профессионалы в корпоративных финансах регулярно называют рынки бычьими и медвежьими на основе положительной или отрицательной цены. движения.Обычно считается, что существует медвежий рынок, когда цена упала на 20% или более от пика, а бычий рынок считается восстановлением на 20% от дна рынка. кроссовер произошел. Это сигнал о том, что цена ценной бумаги растет.
Верно прямо противоположное, когда конвергенция схождения скользящих средних пересекает сигнальную линию вниз. Это медвежье пересечение, и если осциллятор продолжает опускаться ниже сигнальной линии, это хороший признак того, что медведи берут верх.В зависимости от крутизны падения и количества дней, в течение которых оно продолжается, многие трейдеры могут предпочесть продать до того, как потеряют значительную часть стоимости. Это также отличное время для опытных трейдеров, чтобы покупать недооцененные ценные бумаги, которые могут стать потенциальным золотом после возвращения бычьего рынка.
Дивергенция скользящих средних
Аналитики часто наблюдают за MACD в поисках признаков расхождения с движением цены. Когда цена продолжает расти до нового высокого уровня, но MACD не следует этому примеру — вместо этого поворачивает на юг.Это отклонение от ценового действия обычно интерпретируется как признак надвигающейся смены тренда. Фактически, многие трейдеры используют MACD исключительно как индикатор возможного изменения тренда, всегда наблюдая за таким отклонением от ценового действия.
Нижняя линия
Каждый раз, когда сигнальная линия пересекает чрезвычайно высокую или очень низкую точку, будьте осторожны, прежде чем действовать. Точно так же, если пересечение кажется неглубоким или движется вверх или вниз, но затем выходит на плато, будьте бдительны, но не двигайтесь в спешке.Неустойчивость базовой ценной бумаги может быть обманчивой и заставлять MACD двигаться необычным образом.
Как и все остальное, применение MACD на практике и регулярная работа с ним позволит вам почувствовать его общие паттерны и движения, а также поможет вам заострить внимание, когда дело доходит до экстремальных или необычных колебаний. Чем дольше вы работаете с осциллятором, тем легче вам будет правильно интерпретировать его сигналы и успешно торговать.
Подробнее о техническом анализе
- Линии скорости Линии скорости — Технический анализ Линии скорости — это инструмент анализа, используемый для определения уровней поддержки и сопротивления.Они не предназначены для использования в качестве отдельного технического индикатора.
- Осциллятор МакклелланаОсциллятор Макклеллана — Технический анализОсциллятор Макклеллана — это разновидность импульсного осциллятора. Осциллятор Макклеллана рассчитывается с использованием экспоненциальных скользящих средних и предназначен для указания силы или слабости ценового движения, а не его направления.
- Индикатор ADX Индикатор ADX — Технический анализ ADX обозначает индекс среднего направленного движения. Индикатор ADX — это индикатор силы тренда, обычно используемый при торговле фьючерсами.Однако с тех пор он широко применяется техническими аналитиками практически ко всем другим торгуемым инвестициям, от акций до форекс и ETF.
- Руководство по техническому анализу Технический анализ — Руководство для новичков Технический анализ — это форма оценки инвестиций, которая анализирует прошлые цены для прогнозирования будущих ценовых действий. Технические аналитики считают, что коллективные действия всех участников рынка точно отражают всю соответствующую информацию и, следовательно, постоянно определяют справедливую рыночную стоимость ценных бумаг.
Что происходит с супер сбивающей с толку конвергенцией DC Comics?
DC Comics недавно анонсировала Convergence , новое мероприятие, посвященное кроссоверу, намеченное на 2015 год, что, ну, не совсем легко понять. Поскольку многие люди, в том числе фанаты комиксов, продолжают спрашивать, о чем идет речь, мы решили, что, возможно, пора попытаться объяснить, что именно происходит с соавтором перезагрузки DC Джимом Ли, который Джим Ли называет «самым метатическим». грандиозное событие, которое мы сделали ». Потому что это точно.
Итак… Что такое Convergence ?
Придется ответить на этот вопрос подходящим окольным путем. Один из худших образов в фильмах и на телевидении — это когда персонаж владеет очень важной информацией, но отказывается объяснять, что происходит, потому что «вы просто должны увидеть это сами». Это почти никогда не бывает правдой; это просто надуманный способ растянуть сцену для драматического визуального эффекта. На самом деле очень мало событий, которые нельзя объяснить одним предложением. Конвергенция , однако, одна из них.
Самая короткая версия — это следующее большое мероприятие по публикации комиксов DC, которое состоится следующим летом. Начиная с апреля 2015 года, регулярный список комиксов DC перестанет публиковаться на девять недель и будет заменен мини-сериалом из девяти частей и 40 различными мини-сериалами из двух частей, известными под общим названием Convergence . Это также гораздо более смешно, чем это, в том смысле, что воплощает так много того, что не так с комиксами о супергероях сегодня. Время от времени компания делает что-то, что идеально отражает всю вашу критику в ее адрес, привязывает ее к палке и поднимает в воздух, чтобы все видели, как военный штандарт, несенный древнеримской армией, так что все, что вы можете сделать Укажите на это и скажите: Ага. Конвергенция , опять же, одна из таких вещей.
Разве большинство комиксов в DC не пересекаются друг с другом?
Хотя действие большинства комиксов DC происходит в одной и той же общей вселенной, и поэтому они должны оставаться в некоторой степени согласованными друг с другом — Супермен не может быть мертвым, скажем, в одном комиксе, а затем живым в другом, — они обычно фокусируются на свои собственные истории, и оставайтесь на своей полосе, пока едете по супермагистрали DC Universe. Кроссовер, с другой стороны, эквивалентен огромному скоплению машин из 40 автомобилей, когда Бэтмен, Супермен и Флэш сворачивают на переулки друг друга — и часто, что весьма раздражает, прерывают любые интересные повествовательные поездки, которые они проводят. были до того, как кто-то решил поставить их на заднюю часть кроссовера.
Так что же за история этого кроссовера?
Толчок для Convergence вращается вокруг Брэйниака, (обычно) инопланетного андроида и злодея Супермена. Как и многие фанаты комиксов, Брэйниак — что-то вроде коллекционера или, возможно, злобного защитника истории. Его хобби — кража частей инопланетных городов, их уменьшение и сохранение в куполах, как корабли в бутылке. Думайте о них как о его живых проблемах с дыханием, запечатанных в их собственных маленьких майларовых мешочках.Как и любой спекулянт с комиксами, он также хочет, чтобы его вложения были прибыльными, поэтому он часто разрушает остальные города, которые он пробует, чтобы сделать их более редкими и более ценными. И теперь, оказывается, он делает это с другими временными рамками и альтернативными измерениями.
Альтернативные измерения имеют большое значение во вселенной DC, и это не что-то особенное, а скорее многоликая многомерная гидра, известная как Мультивселенная. Первоначально идея множественности измерений часто использовалась как способ объяснить несоответствия между комиксами, хотя она также открывала новые творческие возможности рассказывать истории за пределами ограничений первичной вселенной.На протяжении многих лет Мультивселенная подвергалась множеству переделок, и все это невероятно сложно, но нет необходимости говорить, что вокруг все еще плавает множество альтернативных вселенных DC.
Улучшенный алгоритм гравитационного поиска, ориентированный на практическую конвергенцию, для минимальной дисперсии, без искажений, оптимальное формирование луча
Abstract
В данной статье представлен улучшенный алгоритм гравитационного поиска (ECGSA), ориентированный на конвергенцию, основанный на двух новых модификациях: поиск по лучшим экспериментам и использование коэффициента динамического гравитационного затухания ( α ).ECGSA сохраняет свои лучшие оценки фитнес-функций и использует их в качестве позиций агентов в процессе поиска. Таким образом, оптимальные найденные траектории сохраняются, и поиск начинается с этих траекторий, что позволяет алгоритму избегать локальных оптимумов. Кроме того, агенты могут быстрее перемещаться в пространстве поиска, чтобы получить лучшее исследование на первом этапе процесса поиска, и они могут быстро сходиться к оптимальному решению на заключительном этапе процесса поиска с помощью предлагаемого коэффициента динамического гравитационного демпфирования.Эффективность ECGSA была оценена путем применения его к восьми стандартным тестовым функциям наряду с шестью сложными составными тестовыми функциями. Он также применяется к задаче адаптивного формирования диаграммы направленности в качестве практического вопроса для улучшения весовых векторов, вычисленных методом формирования диаграммы направленности с минимальной дисперсией без искажений (MVDR). Результаты реализации предложенного алгоритма сравниваются с некоторыми известными эвристическими методами и проверены предложенный метод как с точки зрения достижения оптимальных решений, так и с точки зрения устойчивости.
Образец цитирования: Darzi S, Tiong SK, Tariqul Islam M, Rezai Soleymanpour H, Kibria S (2016) Улучшенный алгоритм гравитационного поиска, ориентированный на опыт сходимости, для оптимального формирования луча без искажений с минимальным отклонением. PLoS ONE 11 (7): e0156749. https://doi.org/10.1371/journal.pone.0156749
Редактор: Вен-Бо Ду, Бейханский университет, КИТАЙ
Поступила: 29 сентября 2015 г .; Принята к печати: 18 мая 2016 г .; Опубликован: 11 июля 2016 г.
Авторские права: © 2016 Darzi et al.Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника.
Доступность данных: Все соответствующие данные находятся в документе и его файлах с вспомогательной информацией.
Финансирование: Это исследование поддержано Universiti Tenaga Nasional. Спонсор не имел никакого отношения к дизайну исследования, сбору и анализу данных, принятию решения о публикации или подготовке рукописи.
Конкурирующие интересы: Авторы заявили об отсутствии конкурирующих интересов.
1. Введение
Методы адаптивного массива использовались для уменьшения замирания из-за многолучевого распространения и сильных межканальных помех в мобильной, беспроводной, радиолокационной связи, спутниковой связи и многих других подобных приложениях для достижения надежных характеристик и высокой скорости передачи данных [1]. Одним из известных методов обработки массива является метод минимальной дисперсии отклика без искажений (MVDR) или алгоритм Кейпона [2].Этот подход обычно применяется для подавления нежелательных сигналов (мешающих сигналов) и создания сильного луча в направлении полезного сигнала с помощью его вычисленных весовых векторов. Однако MVDR может иметь неприемлемо низкое обнуление в сценариях динамических и различных помех [3]. В последнее время огромное количество исследований было посвящено применению нескольких подходов к оптимизации для таких задач. Таким образом, такие подходы, как генетические алгоритмы (GA) [4, 5], поиск запретов (TS) [6–8], оптимизация роя частиц (PSO) [9, 10], оптимизация муравьиной колонии (ACO) [11–13] , дифференциальная эволюция (DE) [14], клональный отбор (CS) [15, 16], искусственная пчелиная семья (ABC) [17] и искусственная иммунная система (AIS) [18,19] были предложены и внедрены для улучшения надежные характеристики, такие как подавление помех в антенных системах.
Недавно GSA был представлен как алгоритм эвристической оптимизации, основанный на законах тяготения Ньютона. Было показано, что он превосходит аналогичные алгоритмы, такие как PSO и GA, для общих тестовых функций [20]. С момента создания GSA большое количество исследователей представили различные модифицированные и улучшенные алгоритмы гравитационного поиска, основанные на идее памяти и социальной информации PSO, новые стратегии для определения модели поиска агентов наряду с другими стохастическими стратегиями [21–26]. ].Доказана эффективность GSA и его версии для задач с двоичным кодированием (BGSA) [27] при решении набора нелинейных тестовых функций. Однако очень немногие из этих вариантов GSA были реализованы для приложений формирования диаграммы направленности [28].
В этом исследовании мы предлагаем улучшенный алгоритм гравитационного поиска (ECGSA), ориентированный на конвергенцию, для решения сложных задач оптимизации, таких как MVDR. ECGSA извлекает выгоду из двух модификаций: первая состоит в том, чтобы сохранить оценку функции наилучшей пригодности агентов в процессе поиска и рассматривать их как эффективные позиции агентов с точки зрения применения силы к другим агентам.Благодаря этой модификации никакие обнаруженные оптимальные траектории не теряются в процессе поиска, а также агенты могут выполнять поиск по этим оптимальным траекториям, избегая локальных оптимумов. Это противоречит GSA, в котором траектория поиска нестабильна, поскольку агенты движутся стохастически без какой-либо обратной связи в своих лучших экспериментах. В ECGSA, если какой-либо агент находит лучшее решение, он обновляет свою лучшую позицию до своего текущего местоположения. Вторая модификация заключается в использовании параметра коэффициента динамического гравитационного демпфирования, известного как α .Предлагаемый динамический α представлен для уравновешивания разведочных и эксплуатационных свойств стандартного GSA. При относительно низком значении α на первом этапе процесса поиска агенты могут иметь более высокие скорости для лучшего исследования. С другой стороны, агенты могут эффективно сходиться к оптимальному решению на заключительном этапе процесса поиска, быстро увеличивая значение α , следовательно, уменьшая скорости агентов.
Наиболее существенное различие между стохастическим алгоритмом гравитационного поиска лидера (SLGSA) [28] и ECGSA заключается в том, что ECGSA сохраняет в памяти результаты предыдущих итераций, тогда как SLGSA не требует памяти (т.е.е. использует результаты только текущей итерации). Это приводит к потере оптимальной траектории в SLGSA. Кроме того, SLGSA использует стохастический метод, чтобы определить, каким агентам разрешено влиять на других агентов. Это увеличивает процесс исследования за счет увеличения разнообразия и, следовательно, предотвращения преждевременной конвергенции. ECGSA использует более традиционный подход для поддержания разнообразия на ранней стадии за счет использования высокого значения функции гравитационного коэффициента, G (t) . Следовательно, ECGSA принципиально менее стохастичен, чем SLGSA.Таким образом, ECGSA сходится с большей точностью, чем SLGSA. Поскольку SLGSA имеет стохастический метод увеличения разнообразия, он не использует коэффициент активации, параметр σ . В целом, эти два алгоритма обеспечивают принципиально разные подходы к уравновешиванию аспектов исследования и эксплуатации в процессе поиска.
В этом исследовании MVDR на основе ECGSA использовался при формировании луча с однородными линейными антенными решетками с шагом 0,5 λ между соседними элементами и излучением на 2.3 ГГц. Предлагаемый ECGSA также проверяется путем тестирования на некоторых хорошо известных сложных задачах оптимизации. Остальная часть документа организована в следующем порядке: Раздел 2 представляет собой краткий обзор GSA. Предлагаемый нами ECGSA представлен в разделе 3. Проверка предлагаемого ECGSA с помощью различных функций и результаты моделирования представлены в разделе 4. Раздел 5 представляет основы обычного MVDR. Раздел 6 демонстрирует интеграцию MVDR с ECGSA, а также сравнение производительности обычного MVDR с MVDR-PSO, MVDR-GSA и MVDR-ECGSA в различных сценариях помех.Наконец, в разделе 7 представлены заключительные замечания об этом исследовании.
2. Алгоритм гравитационного поиска
Алгоритм GSA был предложен Рашеди и др. [20, 28] в качестве метода глобальной оптимизации в 2009 году. Движения агентов GSA оцениваются через их массу. Все поисковые агенты GSA тяготеют к агентам с более тяжелыми массами из-за их гравитационного притяжения, как показано на рис. 1. Агенты (массы) с лучшим значением приспособленности в GSA будут соответствовать большим массам.
Для i -го агента из N агентов GSA вектор положения определяется следующим образом: (1) где x i d представляет позицию i -го агента в d -м измерении (переменная решения), а n представляет общее количество переменных решения. Инерционные массы рассчитываются путем оценки пригодности следующим образом: (2) (3) где соответствует i (t) представляет значение соответствия i -го агента на итерации t ; наихудший (t) и лучший (t) представляют наихудшую и лучшую пригодность всех агентов, соответственно; и M i (t) представляет значение массы i -го агента на итерации t .Силу, действующую на массу i из массы j, можно рассчитать следующим образом: (4) где M i и M j представляют собой массы i -го и j -го агентов соответственно; ε — весьма малая константа, препятствующая делению на ноль; R i , j (t) представляет собой евклидово расстояние между i -м и j -м агентами, определяемое следующим образом: (5) и G (t) — гравитационный коэффициент на итерации t .Гравитационный коэффициент G (t) является монотонно убывающей функцией времени, когда он установлен на G 0 в начале и будет экспоненциально затухать для проверки точности алгоритма в соответствии с уравнением ниже: (6) где α — коэффициент гравитационного демпфирования, который постоянен в GSA, t — текущая итерация, а t max — максимальное количество итераций. Полная сила, действующая на агент i th в измерении d th, рассчитывается следующим образом: (7) где kbest — это функция, зависящая от времени, которая может квалифицировать эксплуатацию и исследование.Он инициализируется общим количеством агентов ( k 0 ) при запуске и линейно уменьшается до одного со временем [20]. rand j — случайное число от нуля до единицы. По законам движения, ускорение агента i в размерности d может быть получено следующим образом: (8)
Позиция агента i зависит от скорости агента и может быть обновлена с помощью следующих уравнений: (9) (10) где v i d (t) представляет собой скорость агента i в измерении d на итерации t ; и rand i — случайное число от нуля до единицы.
3.Улучшенный алгоритм гравитационного поиска, ориентированный на экспериментальную конвергенцию
В этом исследовании две различные модификации, использующие наилучшие найденные эксперименты в качестве текущих положений агентов и вводящие значение коэффициента динамического гравитационного демпфирования, представлены в GSA следующим образом:
B. Значение коэффициента динамического гравитационного демпфирования
В идеале алгоритм, основанный на стохастическом поиске, должен фокусироваться на исследовании и следовать ему с использованием.Этап исследования позволяет алгоритму собирать информацию об общем пространстве поиска. Как только пространство поиска изучено в достаточной степени, можно сместить акцент на использование информации, собранной путем исследования. В GSA гравитационный коэффициент G (t) уравновешивает возможности исследования и эксплуатации за счет увеличения / уменьшения величины вектора ускорения агента. Более высокие значения G (t) необходимы для относительно больших перемещений на начальных этапах процесса поиска, в то время как более низкие значения требуются для лучшей сходимости к оптимальному решению на конечной фазе.Значение G (t) экспоненциально уменьшается во время итераций согласно (6). Коэффициент гравитационного демпфирования α регулирует степень демпфирования. Чем больше коэффициент гравитационного демпфирования α , тем быстрее падает гравитационный коэффициент G (t) . Но найти оптимальное значение α как для разведки, так и для эксплуатации — трудное решение. Если α слишком велико, алгоритм страдает от преждевременной сходимости. Точно так же, если оно будет слишком низким, алгоритм не сможет сойтись к оптимальной области на последних итерациях.В ECGSA мы предлагаем коэффициент гравитационного демпфирования α в соответствии со следующим уравнением: (13) где σ — постоянное значение от 0 до 1, представляющее коэффициент активации первой подфункции. Вариации предлагаемого α (t) вместе с G (t) показаны на рис. 2.
Согласно рис. 2, значение α является постоянным и относительно низким для большой части итераций, что дает хорошие возможности для разведки.Оно линейно увеличивается до высокого значения на последних итерациях, что приводит к хорошему использованию и сходимости.
Согласно рис. 3, выбор значения σ от 0,2 до 0,8 дает лучшие результаты, хотя алгоритм менее чувствителен к этому параметру.
Влияние параметра σ на эффективность оптимизации было изучено на мультимодальной функции F8, и результат показан на рис. 3. В этой функции особый случай ECGSA с только разведочной способностью ( σ = 1) не может достичь наилучшего решение.Более низкие значения σ дают значительно лучшие характеристики, чем σ = 1, последовательно из-за эксплуатационного характера ECGSA с σ ≤0,8. В мультимодальном случае быстрая сходимость σ = 0 преждевременна, и алгоритм останавливается на локальных минимумах. ЭКГСА с σ = 1 практически полностью лишена эксплуататорской способности, поэтому не выполняется ЭКГСА с 0,2≤ σ ≤0,8. Интервал 0,2≤ σ ≤0,8 обеспечивает сбалансированную способность к разведке и эксплуатации, как это очевидно в F8.Этот случай показывает, что существует незначительное изменение производительности в этом интервале, что указывает на то, что выбор σ не является критическим. В реальных задачах оптимизации следует избегать только экстремальных значений σ , чтобы сохранить надежность ECGSA.
Предлагаемый коэффициент динамического гравитационного демпфирования чем-то похож на значение температуры алгоритма SA [32], который контролирует компромисс между возможностями поиска и разведки, но они реализуются с помощью других уравнений.
4.Проверка предлагаемого ECGSA
Для проверки ECGSA тестируется на восьми репрезентативных стандартных тестовых функциях вместе с шестью составными тестовыми функциями. Все тестовые функции должны быть минимизированы, а соответствующую информацию можно найти в [20] и [33] для стандартных тестовых функций и составных тестовых функций, соответственно.
Для предлагаемого ECGSA N установлено на 50, t max установлено на 1000, G 0 установлено на 100, αmin и α max являются устанавливается равным 10 и 25 соответственно, а σ устанавливается равным 0.6. Остальные параметры ECGSA устанавливаются так же, как в стандартном GSA [20].
Стандартные контрольные функции приведены в таблицах 1 и 2 для одномодальных и мультимодальных функций, соответственно. Результаты применения алгоритма к унимодальным и мультимодальным тестовым функциям за 30 запусков представлены в таблицах 3 и 4 соответственно. В соответствии с таблицами последствия представлены для среднего, медианного и наилучшего значений полученных решений, а также значения стандартного отклонения для них.Поскольку было показано, что GSA превосходит аналогичные алгоритмы, такие как PSO и GA, для тестовых функций [20], результаты сравниваются с GSA и некоторыми его вариантами.
Как видно, ECGSA превосходит GSA и его варианты по всем тестовым функциям, протестированным в этом исследовании. Стандартное отклонение результата оптимизации от разных прогонов также подтверждает надежность предложенного алгоритма.
Согласно таблице 3, предлагаемый ECGSA может оптимизировать одномодальные функции более последовательно, чем варианты GSA.Это показывает, что возможности поиска эксплуатации у ECGSA значительно лучше, чем у GSA и его вариантов, поскольку унимодальные функции требуют сильной возможности использования для оптимизации из-за выпуклости таких проблем.
Характеристика сходимости предложенного алгоритма по отношению к стандартному GSA показана на рис. 4 для проверки результатов, относящихся к унимодальным функциям. Преждевременная сходимость GSA для F 3 происходит примерно за 200–300 итераций.Но из-за установки низкого значения для α ECGSA может сопротивляться преждевременной конвергенции. Рассмотрение лучших оценок функции пригодности для улучшения оптимальной траектории поиска приводит к хорошему исследованию. Эта стратегия приведет к плохой скорости сходимости, если α мин используется в процессе оптимизации. На 600 итерациях оптимизация ECGSA F 3 показывает резкое снижение из-за начала фазы эксплуатации ( α увеличивается линейно).Результаты показывают, что в аспектах эксплуатации и разведки ECGSA для унимодальных функций был установлен хороший компромисс.
В таблице 4 представлены результаты оптимизации мультимодальных функций в таблице 2 с использованием ECGSA, GSA и его вариантов. Эффективность ECGSA значительно выше, чем у GSA и его вариантов, что проиллюстрировано средними результатами оптимизации в таблице 4. Кроме того, ECGSA также имеет более низкое стандартное отклонение, показывая, что он более стабилен, чем GSA и его варианты.Это обеспечивает превосходную способность избежать локальных минимумов и эффективность исследования ЭКГСА.
На рис. 5 показаны черты, аналогичные рис. 4. На этапе исследования ЭКГСА выгодно более низкое значение α мин по сравнению с α GSA. Таким образом, GSA преждевременно сходится к субоптимальным локальным минимумам до 200 итераций. На этапе эксплуатации, когда α начинает увеличиваться, резкая сходимость приводит к быстрому падению после 600 итераций (рис. 5).Использование наилучших найденных экспериментов с агентами в качестве их текущих положений приводит к тому, что кривая ECGSA спадает с кривой GSA на обоих рисунках 4 и 5, даже до того, как α начнет динамически изменяться. Это ясно указывает на то, что использование наилучших найденных оценок функции приспособленности агентов в качестве их нынешних позиций приводит к улучшению исследования на ранней стадии. Поскольку α начинает изменяться на 600-й итерации, оценка функции наилучшей пригодности агентов улучшенная разведка допускает большее использование за счет привлечения агентов к их лучшим местоположениям, а не к текущему, возможно, неоптимальному местоположению.Таким образом, процесс сходимости более стабилен, что позволяет предлагаемому алгоритму более точно и эффективно оптимизировать несколько сложных составных тестовых функций, чем большинство известных эвристических алгоритмов.
Тест суммы рангов Вилкоксона [37] также используется для анализа и проверки предложенного алгоритма. Поскольку основная функция плотности вероятности для решений алгоритма неизвестна, такие методы, как T-тест, непригодны. Таблица 5 иллюстрирует тест суммы рангов Вилкоксона между GSA и ECGSA для контрольных функций.Считается, что выборки достаточно большого размера для обеспечения жизнеспособного сравнения.
В таблице показаны чрезвычайно низкие значения p для результатов, указывающие на то, что ECGSA может считаться превосходящим GSA как для унимодальных, так и для мультимодальных контрольных функций в пределах доверительного интервала 99,9% (значение p <0,001).
Для большей проверки мы протестировали ECGSA на недавно введенных составных тестовых функциях для проверки производительности эвристических алгоритмов [33]. Эти функции сочетают в себе множество функций различных одномодальных и мультимодальных функций.Эти функции проверяют одновременно несколько свойств предложенного алгоритма. Результаты алгоритма оптимизации составной функции взяты из 20 прогонов для сравнения, как это предлагается в литературе [33].
В таблице 6 сравнивается производительность предложенного алгоритма по сравнению с несколькими хорошо известными эвристическими методами. Результаты ясно показывают, что предлагаемый ECGSA обеспечивает значительно лучшие решения, чем все другие алгоритмы, рассмотренные в таблице 6. Только DE незначительно превосходит GSA в CF6.Тем не менее, ECGSA полностью превосходит DE по другим 5 функциям составного теста. ECGSA показывает высокую стабильность, так как показывает самое низкое стандартное отклонение для большинства функций составного теста.
Таблица 7 подтверждает превосходство предложенного ECGSA над GSA с использованием теста Wilcoxon Rank Sum. Значения p показывают, что ECGSA дает лучшие результаты, чем GSA, в пределах доверительного интервала 99,9% для всех составных функций, кроме CF3.
5.MVDR Beamforming
MVDR — это метод формирования луча на основе системы с минимальной выходной энергией (MOE), как подробно описано ранее [28].MVDR сохраняет отклик главного лепестка на полезный сигнал без искажений, одновременно минимизируя выходную мощность решетки. Веса MVDR можно записать как [18]: (14) где R — ковариационная матрица, H — транспонирование Эрмитажа, а a (θ) — управляющий вектор полезного сигнала. Где вектор поворота a (θ) определяется по формуле: (15) где d — расстояние между элементами антенны, θ i — желаемый угол, а м — количество элементов.Однако, как правило, низкие уровни обнуления по отношению к множественным источникам помех являются одним из основных недостатков метода формирования диаграммы направленности MVDR [3, 18, 38]. Поэтому во многих исследованиях пытались достичь нулей в интерференционных направлениях с помощью различных решений [18, 38–39].
6. Модель приложения
Устойчивость и эффективность предложенного метода были оценены с помощью восьми тестовых функций и шести сложных тестовых функций в предыдущем разделе. В этом разделе представлен расчет отношения сигнал / шум ( SINR, ) и применимость предложенного метода для увеличения SINR метода MVDR, и он сравнивается с традиционными MVDR, MVDR-PSO и MVDR-GSA.В этом исследовании рассматриваются два случая сценариев помех. В обоих случаях один пользователь находится под углом 0 °. В первом случае используется один источник помех, расположенный под углом 30 °, а во втором случае рассматриваются два источника помех под углом 30 ° и 50 °. Использование ECGSA для анализа MVDR было выполнено с использованием MATLAB®.
6.1 Расчет отношения сигнал / помеха и шум
В этой статье ECGSA использовался для повышения эффективности метода формирования диаграммы направленности MVDR путем увеличения значения SINR для четырехэлементной матрицы.MVDR, интегрированный с методами ECGSA, GSA и PSO, оптимизирует SINR с помощью комплексных весов, как подробно описано ранее [28].
В этих алгоритмах w mvdr (вектор веса MVDR) будет сохранен для одного члена в исходной популяции, тогда как остальная часть будет инициализирована случайным образом, как показано в (17). Эта система инициирует создание агентов N , которые обозначены весовыми векторами W N .Весовые векторы в каждом агенте содержат M количество весовых векторов, где M — количество элементов в массиве. (16) где размер популяции i в ECGSA, GSA и PSO установлен на N , а размер d равен количеству датчиков M , как показано в (16).
Весовые векторы всей генеральной совокупности могут быть проиллюстрированы в формате матрицы ниже: (17)
Где
Функция пригодности, согласно литературе [28], — это SINR , как показано в (18).Таким образом, процессы оптимизации будут пытаться максимизировать функцию приспособленности и находить соответствующие векторы оптимальных весов, как показано на рис. 6.
(18)Где
6.2 Моделирование
В этом разделе было смоделировано несколько сценариев помех, чтобы подтвердить предложенный подход для реальных приложений. Параметры GSA выбираются в соответствии с руководящими принципами и рекомендациями, представленными в [20]. Эти конфигурации GSA также широко использовались после разработки GSA [34–36].Во всех симуляциях на основе PSO использовались инерционный вес w = 0,7298 и константы ускорения c 1 = c 2 = 1,49618. Эти значения выбраны на основе общих настроек в литературе [40–42]. Алгоритмы моделируются 20 раз с максимальным количеством итераций, равным 100, и записываются лучшие результаты.
6.2.1 Случай 1: Один пользователь — один мешает
В первом исследовании предполагался один источник помех под углом 30 ° и пользователь под углом 0 °.В таблице 8 показаны веса, соответствующие оптимальным решениям, определенным обычными MVDR, PSO-MVDR, GSA-MVDR, SLGSA-MVDR [28] и ECGSA-MVDR. Эти веса дают характеристику мощности, как показано на рис. 7.
Таблица 9 иллюстрирует улучшение SINR с помощью PSO и GSA по сравнению с обычным MVDR, на 38,89% и 65,04% соответственно. SLGSA [28] и ECGSA показывают лучшую производительность — улучшение на 72,17%. SINR , равное 69,99, является глобальным максимумом для этого случая, который достигается как SLGSA-MVDR, так и ECGSA-MVDR, поскольку требуется только один глубокий ноль.Неспособность MVDR, GSA-MVDR и PSO-MVDR достичь достаточно глубоких нулей ясно иллюстрирует их ограничения.
6.2.2 Случай 2: Один пользователь два вмешательства
В качестве второго тематического исследования были приняты две помехи под углом 30 °, 50 ° и пользователь под углом 0 °. Веса, соответствующие оптимальным решениям, определенным различными алгоритмами формирования луча, показаны в Таблице 10. Результирующие отклики мощности от этих весов показаны на Рисунке 8.
Таблица 11 показывает, что улучшение SINR с помощью PSO, GSA и SLGSA [28] по сравнению с традиционным методом MVDR составляет 67.75%, 87,84% и 105,84% соответственно. Видно, что ECGSA показывает лучшую производительность, что составляет 106,58% процента улучшения. Увеличение количества источников помех по своей сути увеличивает сложность задачи оптимизации. Преимущество ECGSA-MVDR в случае 2 более очевидно, чем в случае 1, особенно для SLGSA-MVDR [28]. Таким образом, ECGSA более универсален и надежен, чем GSA, PSO и SLGSA.
В целом ожидается, что несоответствие в производительности между предложенным алгоритмом и SLGSA будет увеличиваться с увеличением количества источников помех.В случае 1, поскольку SLGSA-MVDR может найти оптимальное решение для одного источника помех, нет никакого потенциала для дальнейшего улучшения. В результате предложенный алгоритм ECGSA дает тот же результат. Впоследствии случай 2 был исследован, чтобы выявить незначительное, но ощутимое улучшение SINR с помощью предложенного алгоритма по сравнению с SLGSA-MVDR. Превосходная производительность ECGSA в случае 2, наряду с результатами тестовых задач, делает ECGSA подходящим алгоритмом уменьшения помех.
7. Выводы
В этой статье представлен улучшенный алгоритм гравитационного поиска, ориентированный на сходимость, с динамическим коэффициентом гравитационного демпфирования α и поиск по лучшим экспериментам. GSA превосходит большинство известных эвристических алгоритмов, но постоянное α и нестабильная траектория поиска без какой-либо обратной связи с их лучшими экспериментами снижают эффективность GSA. Следовательно, предлагаемый коэффициент динамического гравитационного демпфирования изменяет гравитационную постоянную, что приводит к лучшему балансу между разведкой и эксплуатацией.Использование наилучших найденных экспериментов агентов в качестве их текущих положений обеспечивает более устойчивую траекторию, поскольку GSA использует стохастически изменяющееся текущее положение. Эта модифицированная система демонстрирует лучшую скорость сходимости, точность, стабильность и надежность по сравнению с GSA по четырнадцати унимодальным, мультимодальным и составным функциям тестирования. Предложенный алгоритм был применен к задачам формирования луча MVDR, чтобы проверить эффективность ECGSA в реальных приложениях. Результаты показывают превосходную производительность ECGSA-MVDR по сравнению с обычными MVDR, MVDR-PSO, MVDR-GSA и MVDR-SLGSA из-за его способности достигать более высокого SINR .
Вклад авторов
Задумал и спроектировал эксперименты: SD SKT. Проведены эксперименты: МТИ. Проанализированы данные: СД СК. Предоставленные реагенты / материалы / инструменты анализа: SD HRS. Написал бумагу: SD.
Список литературы
- 1. Барреттанд М., Арнотт Р., 1994. Адаптивные антенны для мобильной связи, Электроника и инженерия связи, 6 (4), 203–214.
- 2. Капон Дж., 1969. Анализ частотно-волнового числа с высоким разрешением.Институт инженеров по электротехнике и радиоэлектронике (IEEE), 57 (8), 1408–1418.
- 3. Дахрудж Х., Ю. В., 2010. Скоординированное формирование луча для многоклеточной многоантенной беспроводной системы, транзакции IEEE по беспроводной связи, 9 (5), 1748–1759.
- 4. Кионг Т. С., Исмаил М., Хассан А., 2006. Улучшение пропускной способности прямой линии связи WCDMA за счет использования адаптивной антенны с помощью метода формирования луча MDPC с помощью генетического алгоритма, Журнал прикладных наук, 6 (8), 1766–1773.
- 5. Сюй З., Ли Х., Лю К. З., Ли Дж. Й., 2008. Синтез диаграммы направленности конформной антенной решетки с помощью гибридного генетического алгоритма, Progress In Electromagnetics Research, 79, 75–90.
- 6. Кайд Омар, О., Деббат Ф., Боудген Стамбули, А., 2012. Нулевое управление формированием луча с использованием гибридного алгоритма, основанного на оптимизации спаривания медоносных пчел и запретном поиске в адаптивной антенной решетке, Электромагнитные исследования C, 32, 65–80.
- 7. Гуней К., Акдаглы А., 2001. Обнуление линейных антенных решеток с использованием модифицированного алгоритма поиска запретов, Progress In Electromagnetics Research-Pier, 33, 167–182.
- 8. Акдагли А., Гуней К., 2003. Синтез сформированного луча линейных антенных решеток с одинаковым и неравномерным разнесением с использованием модифицированного алгоритма поиска запретов, Письма о микроволновой и оптической технологии, 36, 16–20.
- 9. Захарис З. Д., Йиултсис Т. В., 2011. Новый метод адаптивного формирования луча, применяемый к линейным антенным решеткам с использованием адаптивного измененного логического PSO, Электромагнитные исследования, 117, 165–179.
- 10. Ходьер М. М., Христодулу К. Г., 2005. Синтез геометрии линейной решетки с минимальным уровнем боковых лепестков и нулевым контролем с использованием оптимизации роя частиц, IEEE Transactions On Antennas And Propagation, 53 (8), 2674–2679.
- 11. Карабога Н., Гуней К., Акдагли А., 2002. Нулевое управление линейными антенными решетками с использованием модифицированного алгоритма оптимизации путешествующих колоний муравьев, Международный журнал компьютерной инженерии радиочастот и микроволн, 12, 375–383.
- 12. Карабога Д., Гуней К., Акдагли А., 2004. Обнуление диаграммы направленности антенной решетки путем управления как амплитудой, так и фазой с использованием модифицированного алгоритма оптимизации колонии путешествующих муравьев, Международный журнал электроники, 91, 241–251.
- 13. Акдагли А., Гуней К., Карабога Д., 2006. Алгоритм оптимизации туристической колонии муравьев для синтеза диаграмм направленности линейных антенных решеток, Electromagnetics Research, 26, 615–628.
- 14. Ян С.W., Gan Y. B., Qing A. Y., 2004. Обнуление диаграммы направленности антенной решетки с использованием алгоритма дифференциальной эволюции », International Journal of RF and Microwave Computer Aided Engineering, 14, 57–63.
- 15. Бабайигит Б., Акдагли А., Гуней К., 2006. Алгоритм клональной селекции для нулевого синтеза линейных антенных решеток посредством управления амплитудой, Журнал электромагнитных волн и приложений, 20, 1007–1020.
- 16. Гуней К., Акдагли А., Бабайигит Б., 2006. Синтез диаграммы направленности линейных антенных решеток с использованием алгоритма клональной селекции, Neural Network World, 16, 489–501.
- 17. Гуней К., Онай М., 2007. Обнуление линейных антенных решеток только по амплитудной диаграмме с использованием пчелиного алгоритма, Progress In Electromagnetics Research, 70, 21–36.
- 18. Тионг, С.К., Салем, Б., Кох, С.П., Санкар, К.П., 2014. Формирователь луча с минимальной дисперсией без искажений (MVDR) с улучшенным контролем уровня обнуления с помощью динамической мутированной искусственной иммунной системы, The Scientific World Journal, ID статьи 164053.
- 19. Дарзи, С., Тионг, С.К., Ислам, М.Т., Исмаил, М., Кибрия, С., Салем, Б., 2014. Нулевое управление адаптивным формированием луча с использованием минимальной дисперсии линейных ограничений при помощи оптимизации роя частиц, динамической мутированной искусственной иммунной системы и гравитационного алгоритм поиска, The Scientific World Journal, ID статьи 724639.
- 20. Рашеди Э., Незамабади-Пур Х., Сарязди С., 2009. GSA: алгоритм гравитационного поиска, Информационные науки, 179, 2232–2248.
- 21. Мирджалили С., Хашим С. З. М., Сардроуди Х. М., 2012. Обучение нейронных сетей с прямой связью с использованием гибридной оптимизации роя частиц и алгоритма гравитационного поиска, Прикладная математика и вычисления, 218 (22), 11125–11137.
- 22. Ашури М., Хоссейни С. М., 2013. Применение нового алгоритма оптимизации роя гибридных частиц и гравитационного поиска для невыпуклой задачи распределения экономической нагрузки, Журнал достижений компьютерных исследований, 4 (2), 41–51.
- 23. Ли Ч., Чжоу Дж., 2011. Идентификация параметров системы управления гидротурбиной с использованием улучшенного алгоритма гравитационного поиска, Преобразование энергии и управление, 52, 374–381.
- 24. Хатибиняа М., Хосрави Ш., 2014. Гибридный подход, основанный на улучшенном алгоритме гравитационного поиска и ортогональном кроссовере для расчета оптимальной формы бетонных гравитационных плотин, Applied Soft Computing, 16, 223–233.
- 25. Ли Ч., Чжоу Дж., Сяо Дж., Сяо Х., 2012, Определение параметров хаотической системы с помощью алгоритма хаотического гравитационного поиска, Хаос, солитоны и фракталы, 45, 539–547.
- 26. Хань Х., Чанг Х. М., 2012. Хаотическая цифровая защищенная связь на основе модифицированного фильтра гравитационного алгоритма поиска ”, Информационные науки, 208, 14–27.
- 27. Рашеди Э., Незамабади-Пур Х., Сарьязди С., 2010. BGSA: алгоритм двоичного гравитационного поиска, Natural Computing, 9 (3), 727–745.
- 28. Дарзи С., Ислам М. Т., Тионг С. К., Кибрия С., Сингх М., 2015. Алгоритм гравитационного поиска стохастического лидера для усовершенствованной технологии адаптивного формирования луча, Plos One |
- 29.Кеннеди, Дж., Эберхарт, Р., 1995. Оптимизация роя частиц, в материалах Международной конференции IEEE по нейронным сетям, 1942–1948.
- 30. Холланд Дж. Х., 1973. Генетические алгоритмы и оптимальное распределение испытаний, SIAM Journal on Computing, 2 (2), 88–105.
- 31. Сторн Р., Прайс К., 1997. Дифференциальная эволюция — простая и эффективная эвристика для глобальной оптимизации в непрерывных пространствах, Journal of Global Optimization, 11, 341–359.
- 32. Nouraniy Y., Andresenz B., 1998. Сравнение смоделированных стратегий охлаждения отжига, J. Phys. A: Математика. Gen, 31, 8373–8385.
- 33. Лян, Дж., Сугантан, П., Деб, К., 2005. Новые функции проверки композиции для численной глобальной оптимизации, в Swarm Intelligence Symposium, Proceedings 2005 IEEE, 68–75.
- 34. Бинджи Г., Фэн П., 2013 г., Модифицированный алгоритм гравитационного поиска с памятью частиц и его применение, Международный журнал инновационных вычислений, информации и управления, 9 (11), 4531–4544.
- 35. Хаджезаде М., Таха М.Р., Шафи А. Э., Эслами М., 2012. Модифицированный алгоритм гравитационного поиска для анализа устойчивости откосов, Технические приложения искусственного интеллекта, 25, 1589–1597.
- 36. Хаджезаде М., Таха М. Р., Эслами М., 2013. Эффективный алгоритм гравитационного поиска для оптимального проектирования подпорных стен, Структурная инженерия и механика, 45 (1), 111–127.
- 37. Деррак Дж., Гарсия С., Молина Д., Эррера Ф., 2011. Практическое руководство по использованию непараметрических статистических тестов в качестве методологии для сравнения алгоритмов эволюционного интеллекта и интеллекта роя, Swarm and Evolutionary Computing, 1 (1), 3–18.
- 38. Лю Ф. Л., Ван Дж. К., 2011. Надежный формирователь луча mvdr для управления уровнем обнуления с помощью многопараметрического квадратичного программирования, Progress In Electromagnetic s Research C, 20, 239–254.
- 39. Лоренц Р. Г., Бойд С. П., 2005. Робастное формирование диаграммы направленности с минимальной дисперсией, IEEE Trans.Сигнальный процесс, 53 (5), 1684–1696.
- 40. Ван Ден Берг, Ф., 2001. Анализ оптимизаторов роя частиц, доктор философии. диссертации, факультет Нат. Сельское хозяйство. Наук, Univ. Претория, Претория, ЮАР.
- 41. Ши Ю., Эберхарт Р., 1998. Модифицированный оптимизатор роя частиц, IEEE Int.