
Тренажеры для мышц спины | Gorilla Sports
1. Верхняя Тяга/Горизонтальная Тяга
Предназначенная для комфортного использования, эта фитнес машина оснащена регулируемой коленной подушечкой и мягкими валиками, что также обеспечивает дополнительную стабильность
Используя только самые лучшие компоненты, эта 2-в-1 одно станционная машина обеспечивает плавные, ровные движения, которые доставляют реальное удовольствие, будь вы опытным атлетом или начинающим новичком.
Польза тяги
На самом деле сделав этот спортивный тренажер регулярной частью вашего фитнес тренинга вы сможете создать потрясающий, вылепленный верхний торс, тренируя широчайшие мышцы, дельтоиды, бицепсы, трицепсы, трапециевидные мышцы, суставы, ромбоиды и абдоминальные мышцы пресса. Без сомнений этот силовой тренажер необходим любому, кто серьезно настроился войти в хорошую спортивную форму!
Советы по Технике:
— Держите грудь высоко/приблизьтесь грудью к планке
— Держите локти направленными вниз
— Напрягите широчайшие мышцы спины/почувствуйте их подмышками
— Понизьтесь до уровня подбородка или чуть ниже
— Возьмитесь на ширине плеч или немного шире
— Также попробуйте использовать планку «V-захват»
2.
 Стойка для подтягиваний
Стойка для подтягиванийСтойка турник-прес-брусья былa разработанa, чтобы помочь создать накачанное мощное тело. Его легко установить и вы можете приспособить его там, где вам нужно.
Перекладина предлагает Вам 10 разных вариантов хвата, что делает его наиболее подходящим для разносторонних тренировок. Эта функция позволяет вам прорабатывать мышцы под разными углами.
Перекладина для подтягивания позволяет выполнять подтягивания обратным хватом и подтягиваться плавно. Это поможет легко создать сильную спину и бицепсы в короткие сроки.
Когда многофункциональный турник установлен у стены, вы можете выполнять ситап-пресс и другие подобные упражнения.
Используя дома турник-прес-брусья стойку, вы получаете множество преимуществ. Просто выделите 20 минут в день на тренировку на турнике. Это значительно изменит ваше тело, сделает его более сильным, выносливым, ваш хват станет сильнее, мышцы подтянутыми и т.д.
Основные особенности:
— Инновационное спортивное оборудование от Gorilla Sports, которое обязано быть в каждом тренажерном зале.
— Стабильная автономная стойка для подтягиваний для тренировки верхней части туловища.
— Большие брусья для безопасности и долговечности.
— Антискользящие резиновые захваты, чтобы избежать несчастных случаев при отжиманиях на брусьях.
— Электростатически нанесенное порошковое покрытие делает стойки долговечными и приятными на ощупь.
— Вы можете разместить стойки буквально в любом месте.
— Широкое основание для повышенной стойкости.
3. Тренажер гиперэкстензия
С помощью тренажера вы можете тренировать брюшные мышцы, поясницу и ноги.
Вы можете настроить ее на 4 разных высоты. Скамья гиперэкстензия надежна и долговечна, она имеет прочную стальную раму. Рукоятки по сторонам тренажера обеспечивают дополнительное удобство для выполнения упражнений.
Положительные стороны:
— Упражнения гиперэкстензия укрепляют все тело: нижнюю часть спины, подколенные сухожилия и брюшную область.
— Делая гиперэкстензию, вы можете избавиться от боли в пояснице. Если вы страдаете хронической болью в пояснице, обратитесь к врачу, прежде чем начать использовать тренажер.
Если вы страдаете хронической болью в пояснице, обратитесь к врачу, прежде чем начать использовать тренажер.
— Обратная гиперэкстензия укрепляет ваши мышцы спины. Это упражнение улучшает вашу осанку и баланс тела.
— Тренажер гиперэкстензия не занимает много места. Он развивает гибкость в каждой тренируемой группе мышц.
Тренировка для мышц спины
Для достижения различных целей подход к тренировкам и сами упражнения следует чередовать на протяжении года.
Когда дело доходит до укрепления спины, многие ожидания относительно этой большой группы мышц не сбываются по различным причинам. Первая причина – то, что вы не можете видеть собственную спину при проведении тренировок, что затрудняет достижение «связи ума и мышц».
Вторая причина заключается в том, что вы не можете увидеть свою спину при позировании, за исключением случаев, когда кто-то может сфотографировать ее и показать вам. Эта проблема усложняет процесс ее укрепления до желаемого результата.
Эти проблемы приводят к тому, что многие культуристы не проводят на 100% интенсивные тренировки этой очень большой группы мышц, так как не могут увидеть ее и задаются вопросом: «зачем тогда ее тренировать?». Хуже всего в этом то, что состояние спины культуриста обычно является определяющим фактором успеха на конкурсах бодибилдеров.
В качестве примера посмотрите на конкурс Мистер Олимпия — Джей не может победить Ронни в области спины и это является одной из основных причин по которой Ронни получит титул в седьмой раз оставляя Джея лишь на 2-м месте.
Спина является одной из самых обширных и сложных групп мышц, что требует высокой степени концентрации и внимания к деталям при проведении тренировок. При тренировке спины необходимо использовать широкий спектр упражнений, помогающих укрепить мышцы спины и сделать их сильнее
Разделите упражнения для верхней и нижней частей спины
Я вкладываю в это понятие то, что при тренировке спины вам следует начинать тренировки сконцентрировавшись на верхней части спины (трапециевидная мышца и широчайшая мышца спины), а затем переходить к нижней части. Я чувствую, что это очень хорошая концепция, которую культуристы начинают использовать при укреплении мышц спины.
Я чувствую, что это очень хорошая концепция, которую культуристы начинают использовать при укреплении мышц спины.
Если вы используете становую тягу при проведении тренировок со спиной, думаю, что ее стоить применять на ранних стадиях тренировки, пока у вас больше энергии и сил на это сложное упражнение. При проведении сначала тренировки на верхней части спины, а затем уже на нижней части не думаю, что вам стоит использовать становую тягу в конце тренировки из-за спада энергии к этому моменту.
Говоря о «верхней части спины» упражнения, попадающие в эту категорию, – это упражнения, нацеленные на эту конкретную часть спины, в основном на широчайшие мышцы и верхнюю среднюю часть спины. Так что выбирая упражнения для верхней части спины вы можете выбирать из широкого спектра растягивающих упражнений, переворотов и подтягиваний – упражнений, ориентированных на укрепление мышц верхней части спины.
Говоря об упражнениях на «нижней части спины» вам следует выбирать упражнения, ориентированные на «зону рождественского дерева» (место, где нижние широчайшие мышцы спины переходят в мышцу, выпрямляющую позвоночник), а также на мышцы, поддерживающие торс.
Существует множество силовых упражнений, ориентированных на эту область, такие как становая тяга, тяга в наклоне, жим гантелями, тяга Т-штанги, тяга на скамье для жима, тяга троса и переразгибание. Все эти упражнения ориентированы на одну или несколько областей нижней части спины.
Тренажеры для спины — цены, характеристики, фото
Любое изделие, представленное в разделе можно купить.
На этой странице вы можете ознакомиться с характеристиками и выбрать тренажер для спины. Мы предлагаем вам различные тренажеры для спины: с регулируемой нагрузкой, гиперэкстензии, блочные рамы, тяги и многие другие.
Мышцы спины участвуют почти во всех движениях, совершаемых человеком и важно укреплять их, чтобы они защищали и поддерживали позвоночник. И, согласитесь, крепкие и накачанные мышцы спины — это красиво и привлекательно!
Габариты, мм:1800×1680×740 Группы мышц: широчайшие, круглые мышцы спины и бицепсов. | Габариты, мм:2537×795×2210 Группы мышц: груди, бицепса, трицепса, дельты и широчайших мышц спины и ягодичных. | Габариты, мм: 2300×2095×710 Группы мышц: мышцы спины и бицепсы. |
Группы мышц: широчайшие и круглые мышцы спины, бицепсы. | Габариты, мм: 2490×1150×890 Группы мышц: пресса, груди, спины, трицепсы и бицепсы. | Габариты, мм: 2210×737×1295 Группы мышц: мышцы груди, бицепса, трицепса, дельты, широчайшие мышцы спины и ягодичные мышцы. |
Габариты, мм: 2230×2255×710 Группы мышц: широчайшие и круглые мышцы спины, бицепсы. | Габариты, мм: 750×1180×700 Группы мышц: длинные мышцы спины. | Габариты, мм: 2430×1150×1230 Группы мышц: мышцы пресса, спины, рук. |
Группы мышц: мышцы спины. |


Приобретение оборудования
Тренажеры для спины вы можете купить у нас следующими способами:
Доставка и гарантии
Вся продукция всегда в наличии на нашем складе. Мы оперативно доставим спортивное оборудование в любой регион России. На всю продукцию предоставляется гарантия — 12 месяцев.
Тренажер для реабилитации инвалидов HUR ЕА 9150 — тяги руками к себе — с доступом для инвалидных колясок
Наименование товара, сведения о его функциональных (потребительских свойствах) и качественных характеристиках (описание параметров товара)
Силовой пневматический тренажер «Тяга к себе» для силовой проработки мышц верхней части спины, широчайших мышц спины и бицепсов, код ЕА9150, марка HUR, страна происхождения — Финляндия.
— Регулируемая рабочая нагрузка за счет подачи воздуха от воздушного компрессора через пластиковые провода.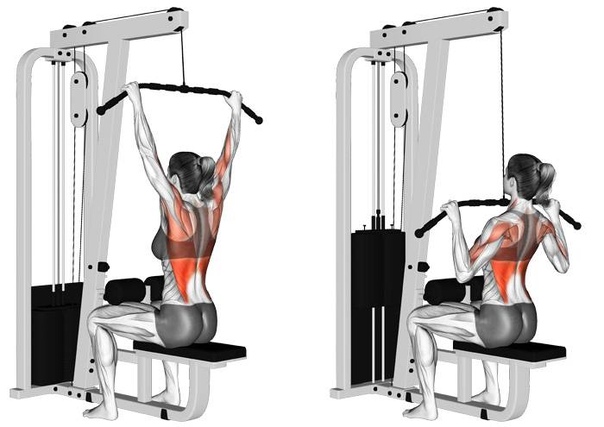
— Максимальное давление воздушного компрессора – 9,9 бар.
— Величина рабочей нагрузки тренажера: 0-35 кг (на каждый рабочий рычаг).
— Плавная регулировка рабочей нагрузки шагом в 1 кг.
— Отсутствие эффекта инерции груза в конечной фазе тренировочного движения, для обеспечения уменьшения нагрузки на суставы.
— Отсутствие необходимости прилагать дополнительное усилие для сдвигания груза в начале движения для устранения стартовой взрывной нагрузки на суставы и соединительные ткани, способной вызвать травму пользователя.
— Отсутствие в открытом доступе движущих частей рабочего механизма тренажера (блоки, тросы, цилиндры) для устранения риска получения травмы пользователями.
— Возможность быстрого понижения тренировочной нагрузки.
— Возможность подъехать к тренажеру на коляске и тренироваться, не слезая с коляски.
— Возможность проведения целевых тренировочных программ по укреплению мышечного корсета.
— Возможность использования приставного сидения с регулируемой высотой, на задней части опоры оснащенного роликами для облегчения перемещения.
— Возможность технического обновления и повышение технического уровня тренажера – доукомплектация системой компьютерного управления тренировками “Smart” с помощью дополнительных, отдельно приобретаемых компонентов.
— Размеры тренажера: ширина 116 см х длина 105 см х высота 105 см.
— Вес тренажера: 81 кг.
— Уровень шума: 50 децибелов.
— Наличие двух рабочих рычагов, могущих двигаться отдельно друг от друга.
— Наличие многозахватных рукоятей.
— Наличие механизма замыкания.
— Настраиваемое положение упора для груди.
— Наличие кнопки приближения рычагов к пользователю.
— Количество рабочих пневматических цилиндров – два.
— Управление уровнем нагрузки через нажатие на кнопки «+» и «-» на приборной панели тренажера.
— Увеличенный размер кнопок «+» и «-» для облегчения управления уровнем нагрузки.
— Четкая видимость уровня нагрузки на приборной панели.
— Эргономичная форма опоры для спины для обеспечения поддержки во время выполнения упражнений.
— Возможность присоединить изометрический датчик измерения силы.
— Рама тренажера из стальной сварной конструкции с окраской порошковым нанесением.
— Обивка тренажера из искусственной кожи с сопротивляемостью чистящим средствам, износу от трения, трудновоспламенимая.
— Наличие комплекта пластиковых проводов диаметром 10мм и 6мм, переходников для подключения проводов к компрессору.
— Цвет рамы: по согласованию с Заказчиком.
— Цвет обивки: по согласованию с Заказчиком.
— Стандарты качества: Регистрационное удостоверение Минздрава РФ, ISO 9001, VDMA, CE, сертификат Ростеста.
— Гарантийный срок – на движущиеся части 3 года, на раму 10 лет.
ТДХ 0170. Тренажер Хаммер для широчайших мышц спины и груди
ТДХ 0170. Тренажер Хаммер для широчайших мышц спины и груди — ProfigymДобавление товара в корзину
 org/ListItem»>
Главная
/
org/ListItem»>
Главная
/- Тренажеры Хаммер /
- ТДХ-0170-DE Тренажер «ХАММЕР» для груди и спины
Добавить
в корзину
Купить
в 1 клик
Cерия Rubin
ТДХ-0170-DE. Тренажер «ХАММЕР» для груди и спины cерия Rubin.Фото 1Добавить
в корзину
Купить
в 1 клик
Данный тренажер является спортивным станком, который имеет две стороны – для проработки мышц груди и спины. Для тренировки грудных мышц спортсмену необходимо лечь на наклонную скамью, взяться за специальные ручки и выполнять жим от груди в наклоне.
Технические параметры станка Хаммер ТДХ-0170-DE:
- Основа станка — высококачественные профильные трубы производства «Северсталь» сечениями 80х40, 60х60 и 40х40 мм.
- Фурнитура из пластика отсутствует.
- Элементы, которые подвергаются трению, обработаны составом из хрома и никеля.
- Хваты и рукоятки хромированные.
- Подвижные элементы оснащены шариковыми подшипниками, которые не требуют обслуживания.
-
В качестве покрытия используется порошковое напыление:
- рама выполнена в цвете «белый глянец»;
-
некоторые элементы окрашены в цвет «серебристо-черный антик».

- Отягощение – тренировочные блины, которые имеют диаметр посадочного отверстия 51 мм (не входят в комплект).
-
Материалы мягких деталей:
- винилискожа;
- ПВВ плотностью 140 кг/куб.м;
- фанера, которая усилена сталью (3 мм).
- В качестве опор используются вибропоглощающие подпятники из резины, которые имеют следующие размеры: диаметр 120 мм, толщину 20 мм. Также оборудование ProfiGym можно прикрепить к полу за счет отверстий в ножках.
- Габариты: 2040х1270х1970 мм.
- Вес: 130 кг.

Technogym Selection 700 Low Row
О тренажёре Low Row
Тренажёр Low Row позволяет укрепить широчайшие мышцы спины, выполняя одно из базовых упражнений — горизонтальную тягу. Дополнительную нагрузку получают бицепсы и ромбовидные мышцы.
 Как и все тренажёры серии Selection 700, Low Row
отличается компактностью, стильным современным дизайном и интуитивно понятными
настройками. Биомеханика оборудования делает каждое движение максимально
безопасным для суставов и эффективным для проработки целевых групп мышц.
Как и все тренажёры серии Selection 700, Low Row
отличается компактностью, стильным современным дизайном и интуитивно понятными
настройками. Биомеханика оборудования делает каждое движение максимально
безопасным для суставов и эффективным для проработки целевых групп мышц.Эргономичное сиденье Bioseat
Удобное эргономичное сиденье Bioseat помогает принять правильное положение тела. Мягкая на ощупь обивка с наполнителем разной плотности повышает комфорт во время тренировки.Тренировка одной рукой
Независимо движущиеся рычаги делают нагрузку более сбалансированной и укрепляют мышцы-стабилизаторы тела. Центральная рукоять поддерживает равновесие при выполнении упражнения одной рукой.Оптимальное сцепление
Специальное нескользящее покрытие ручек обеспечивает оптимальное сцепление с ладонью.Smart pin
Smart Pin — специальный весовой стек 2,5 кг, который можно добавить к основному весу. Такая
функция снижает шаг увеличения нагрузки в два раза. Это очень важно для новых
пользователей и
для изолированной тренировки мышц.
Тренажёры со стековой нагрузкой — самые безопасные и простые для силовой
тренировки.
Идеально подходят новичкам, не требуют подстраховки даже при работе с большими
весами.
Такая
функция снижает шаг увеличения нагрузки в два раза. Это очень важно для новых
пользователей и
для изолированной тренировки мышц.
Тренажёры со стековой нагрузкой — самые безопасные и простые для силовой
тренировки.
Идеально подходят новичкам, не требуют подстраховки даже при работе с большими
весами.Visual set up
Рычаги и другие элементы регулировки тренажёра окрашены в ярко-жёлтый цвет, поэтому вы легко самостоятельно настроите оборудование, даже если никогда до этого на нём не занимались.Наглядная инструкция и QR-NFC интеграция
Инструкция находится прямо на уровне глаз пользователя и содержит наглядную информацию о типе упражнения, порядке выполнения и работающих мышцах. Используйте смартфон, чтобы отсканировать QR или NFC код для получения дополнительных инструкций, а также для контроля и отслеживания своих тренировок.Встроенное углубление для смартфона
Телефон часто нужен в спортзале для отслеживания тренировки и фиксации результатов. Теперь вам не нужно думать, куда положить его во время своего подхода — тренажёр
оборудован
специальным углублением для смартфона.
Теперь вам не нужно думать, куда положить его во время своего подхода — тренажёр
оборудован
специальным углублением для смартфона.Характеристики Low Row
Ширина (мм)
1213
Длина (мм)
1067
Высота (мм)
1498
Вес тренажера (кг)
225
Стек с весом стандартный (кг)
90
Стек с весом усиленный (кг)
130
Страна производства
Италия
Модификации
Selection 700 Low Row Стандартный (артикул MNHCNN0) — 442 890 р.
Selection 700 Low Row Усиленный (артикул MNHCNN1) — 472 815 р.
Галерея
Серия Selection 700
Тренажёры серии Selection 700 занимают мало места и легко вписываются в пространство фитнес-центра или домашнего тренажёрного зала. Оборудование с интуитивно понятными настройками, безопасной стековой нагрузкой и идеальной биомеханикой прекрасно подходит для высокоэффективных силовых тренировок.Посмотрите все тренажеры серии Selection 700.
Рычажная тяга на спину – строим атлетичное тело
Мышцы спины – это вторая по величине мускульная группа в человеческом теле. Проигрывает она разве что только ногам. Среднюю часть спины формируют широчайшие мышцы или как их еще называют, крылья. Развитие этих мышц делает спину шире, рельефнее и формирует V-образный силуэт. Одним из упражнений для тренировки широчайших является рычажная тяга или тяга в тренажере хаммер.
Преимущества тренажера
Рычажная тяга целенаправленно воздействует на средний участок спины. Прелесть выполнения упражнения в тренажере в том, что ваш корпус надежно фиксирован и позвоночник не испытывает ненужных перегрузок. В то же время вы вольны использовать вертикальные и горизонтальные ручки для изменения хвата и регулировать высоту сидения для смещения акцента нагрузки на верхний, средний или нижний край широчайших.
Упражнение эффективно развивает спину.Иными словами, выполняя тягу в хаммере, вы получаете достаточно большую вариативность движения, притом позвоночник находится в безопасности. Последнее, в свою очередь, позволяет работать с большими весами.
В хаммере удобно делать тяги одной рукой. Некоторые спортсмены предпочитают в этом случае выполнять упражнение стоя, упершись второй рукой в спинку.
Широчайшие мышцы.Среди положительных эффектов, которые вы получите, включив упражнение в программу тренировок, также можно отметить то, что развитие крупной мышечной группы придает фигуре визуально заметную атлетичность и спортивный вид.
Также стоит сказать и о противопоказаниях. При проблемах с позвоночником или его травмах, любые упражнения, нагружающие спину, можно делать только с разрешения врача. В остальном тяга достаточно безопасна.
Техника выполнения
Тяга в рычажном тренажере на спину делается следующим образом:
- Подготовьте оборудование. Настройте высоту сидения тренажера под свой рост. При выполнении движения ваши кисти должны быть направлены к поясу.
- Сядьте и упритесь грудью в вертикальную поверхность. Позвоночник при этом абсолютно прямой, лопатки прижаты. Вытяните руки и возьмитесь за ручки тренажера. Если вы используете узкий хват, локти следует прижимать к корпусу. Когда тянете за горизонтальные ручки (широкий хват), локти расставляются в стороны.
- Потяните ручки на себя, максимально сведя лопатки в конечной точке движения. Грудь во время выполнения движения «приклеена» к опорной поверхности тренажера, положение позвоночника не изменяется. Не отклоняйтесь назад. Ошибкой также является разворот верхней части корпуса в сторону при выполнении тяги одной рукой.
- Опустите вес, но не возвращайте его на опору. Мышцы все время должны находиться в напряжении.
 Ошибкой также является разворот верхней части корпуса в сторону при выполнении тяги одной рукой.
Ошибкой также является разворот верхней части корпуса в сторону при выполнении тяги одной рукой.Как правило, рычажная тяга делается в 3 подхода по 8-12 раз. В тренировку ее можно включить вместе с другими упражнениями на спину: тягой штанги в наклоне, тягой гантели одной рукой или тягами в блочных тренажерах.
Рекомендации к тренировке
Важной особенностью этого упражнения является то, что при подтягивании рычагов к телу в работу включаются бицепсы.
Чем большее усилие вы производите за счет бицепсов, тем меньше достается мышцам спины. Но бицепс сам по себе меньше и слабее спины, и соответственно устает раньше. В результате тянуть вы больше не можете, а широчайшие должным образом не нагрузили. Чтобы избежать этой проблемы старайтесь тянуть к назад не кисти, а локти. Сосредоточьтесь на работе мышц спины и постарайтесь максимально выключить бицепс. Это умение контролировать работу мышц приходит не сразу, но оно необходимо каждому спортсмену для достижения высоких результатов.
Нагрузка на широчайшие зависит, в том числе и от того, к поясу или к груди вы тянете ручки тренажера. В первом случае наибольшим образом нагружается верх широчайших, во втором – нижняя и средняя часть.
Не так часто, но все же в залах встречаются рычажные тренажеры, позволяющие делать вертикальные тяги. Это фактически облегченный аналог подтягиваний. Они позволяют широчайшим мышцам расти не только в толщину, но и в ширину.
Тренируя спину, вы не только делаете свою фигуру красивой и атлетичной, но и стабилизируете позвоночник, принося тем самым пользу своему здоровью.
ST-118 Блок для мышц спины комбинированный INTERATLETIK GYM Грузоблочные тренажёры
Описание товара:
Блок для мышц спины комбинированный (грузоблочный) предназначается для создания спортивного, атлетического телосложения, помогает прорабатывать мышцы спины. Благодаря занятиям на блоке для мышц спины рельеф спины становится более выраженным, четким, увеличивается ширина спины, растет мышечная масса и сила.
Используется атлетами для формирования гармоничного спортивного телосложения, спортсменами разных дисциплин в рамках физической подготовки.
Блок для мышц спины совмещает в себе функции двух тренажеров – блока для нижней тяги и блока для верхней тяги. Это отличное решение для спортивного или тренажерного зала, поскольку позволяет получить вдвое больше функциональности при существенной экономии площади.
Занятие на блоке верхняя тяга включает в работу следующие мышечные группы: широчайшие мышцы спины, дельтовидные мышцы, трапецевидные мышцы – основная нагрузка, бицепс, мышцы предплечья и другие мышцы рук – вторичная нагрузка.
Тренажер позволяет варьировать варианты выполнения основного упражнения, а потому изменение ширины хвата, расположение ладоней на перекладине позволяет включить в работу также и другие мышечные группы, например, задействовать грудные мышцы.
Выполняя упражнения на блоке нижней тяги, включают в работу такие мышцы: широчайшие, трапециевидные, ромбовидные, выпрямляющие и большие круглые мышцы спины. При этом тем или иным образом в процессе участвуют бицепсы, трицепсы, дельтовидные и грудные мышцы.
Техника работы с блоком верхней тяги следующая: необходимо занять исходное положение на скамье, зафиксировав бедра ограничителями. Руки следует поднять вверх и взяться за перекладину. На выдохе перекладину следует подтянуть к середине груди, начав движение со сведения лопаток.
Данное упражнение позволяет варьировать ширину хвата – руки можно располагать на различном расстоянии друг от друга, так и положение ладоней – можно осуществлять захват перекладины ладонями к себе, либо же от себя. Также при выполнении верхней тяги можно использовать различные виды перекладин и рукоятей. Такие вариации позволяют включать в работу дополнительные группы мышц, перераспределять нагрузку, акцентировать ее на определенной мышечной группе.
С блоком нижней тяги возможно выполнять следующие упражнения: необходимо принять исходное положение тела – ноги на подставках для ног, спина прямая, с прогибом в пояснице, руки вытянуты, лежат на рукояти тренажера. На выдохе следует свести лопатки и начать движение руками назад. Корпус не должен отклоняться назад. Возвращаясь в исходное положение, не следует отпускать вес, необходимо сохранять напряжение в мышцах спины.
При работе с тренажером нижняя тяга, используются различные рукояти – прямая перекладина, ручки с параллельным хватом. Меняя перекладины, а также положения кистей во время тренировки, вы пользуетесь возможностью акцентировать нагрузку на определенной мышечной группе.
Категория: профессиональный многофункциональный.
Профиль несущей конструкции 60х60х2,5 (мм). Тренажер окрашивается порошковой краской. Сидение изготовлено из многослойной фанеры (15 мм), в качестве наполнителя и обивки используется двухслойный пенополиуретан, устойчивый к усадке и высококачественная искусственная кожа. Регулируемый валик для ног, позволяет заниматься на тренажере людям с разными ростовыми характеристиками. Грузоблочный стек тренажера состоит из 21 металлической плиты весом по 5кг, и направляющих. Изменение нагрузки происходит при помощи селектора (фиксатора). Для приведения в движение грузов используется трос 5 мм в пвх оплетке с усилием на разрыв 500 кг с макс. нагрузкой – 800кг. Скрытая система подшипников и амортизаторов обеспечивает плавность хода и шумопоглащение. Тренажер оснащен двойным защитным кожухом грузоблочного стека, информационной таблицей на русском языке, памяткой технического обслуживания, амортизирующими подпятниками, не требующими крепления к полу.
Ручки в комплект не входят. Выбрать ручки можно в разделе Дополнительное оборудование -ручки к тренажерам .
Группы мышц:
Технические характеристики:
| Нагрузка, кг: | 105 |
| Длина, мм: | 2095 |
| Ширина, мм: | 710 |
| Высота, мм: | 2300 |
| Вес, кг: | 194 |
Валидация имитационной модели подъема кожно-мышечного лоскута на ножке широчайшей мышцы спины in vivo у свиней
Борман К.Р., Фурман Г.М., Ассоциация директоров программ хирургии (2009 г.) «Часы работы в стационаре: улучшение сна, наблюдение и безопасность»: ответ Ассоциации директоров программ по хирургии к декабрьскому отчету Института медицины за 2008 год. Операция. 146 (3): 420–427
Статья Google Scholar
Бритт Л.Д., Сачдева А.К., Хили Б.Б., Уэлен ТВ, Блэр П.Г., Члены Целевой группы ACS по продолжительности дежурства резидентов (2009 г.) Часы дежурства в хирургии для обеспечения безопасности пациентов, обеспечения оптимального обучения и профессиональной подготовки ординаторов и содействия благополучию резидентов. Бытие: ответ Американской коллегии хирургов на отчет Института медицины «Часы работы резидентов: улучшение сна, наблюдение и безопасность». Операция. 146 (3): 398–409
CAS Статья Google Scholar
Чан В.Й., Маттеуччи П., Южный С.Дж. (2007) Валидация микрохирургических моделей в обучении и компетенции в области микрохирургии: обзор. Микрохирургия. 27 (5): 494–499
Статья Google Scholar
Джавид П., Айдын А., Моханна П.Н., Дасгупта П., Ахмед К. (2019) Текущее состояние имитационных и обучающих моделей в микрохирургии: систематический обзор. Микрохирургия 39 (7): 655–668
Статья Google Scholar
Starkes JL, Payk I, Hodges NJ (1998) Разработка стандартизированного теста для оценки навыков наложения швов у начинающих микрохирургов. Микрохирургия. 18 (1): 19–22
CAS Статья Google Scholar
Аткинс Дж. Л., Калу П.У., Ланнон Д.А., Грин К.Дж., Батлер П.Э. (2005) Обучение микрохирургическим навыкам: оценка обучения микрохирургии. Микрохирургия 25 (6): 481–485
Статья. Google Scholar
Christensen TJ, Anding W, Shin AY, Bishop AT, Moran SL (2015) Влияние микрохирургической подготовки на практику ручных хирургов. J Reconstr Microsurg 31 (6): 442–449
Артикул Google Scholar
Илие В.Г., Илие В.И., Добряну С., Гету Н., Лучиан С., Пиепту Д. (2008) Обучение микрохирургическим навыкам на неживых моделях. Микрохирургия. 28 (7): 571–577
Статья Google Scholar
Ghanem A, Kearns M, Ballestín A, Froschauer S, Akelina Y, Shurey S, Legagneux J et al (2020) Согласованное заявление Международного общества моделирования микрохирургии (IMSS) по минимальным стандартам для базового курса микрохирургии, требованиям к микрохирургическому анастомозу глобальная рейтинговая шкала и минимальные пороги обучения. Травма S0020-1383 (20) 30078–4. https://doi.org/10.1016/j.injury.2020.02.004
Carey JN, Rommer E, Sheckter C, Minneti M, Talving P, Wong AK, Garner W et al (2014) Моделирование пластическая хирургия и микрососудистые процедуры с использованием перфузированных свежих человеческих трупов.J Plast Reconstr Aesthet Surg 67: 2
Kerrigan CL, Zelt RG, Thomson JG, Diano E (1986) Свинья как экспериментальное животное в исследованиях пластической хирургии для изучения кожных лоскутов, кожно-мышечных лоскутов и кожно-фасциальных лоскутов . Lab Anim Sci 36 (4): 408–412
CAS PubMed Google Scholar
Bodin F, Diana M, Koutsomanis A, Robert E, Marescaux J, Bruant-Rodier C (2015) Модель свиньи для обучения реконструкции груди со свободным лоскутом.J Plast Reconstr Aesthet Surg 68 (10): 1402–1409
Millican PG, Poole MD (1985) Модель свиньи для исследования мышц и кожно-мышечных лоскутов. Br J Plast Surg 38 (3): 364–368
CAS Статья Google Scholar
Небрил Б.А. (2019) Модель свиньи и онкопластическая тренировка: результаты и размышления. Мастология 29 (2): 55–57
Статья Google Scholar
Oliveira MM, Araujo AB, Nicolato A, Prosdocimi A, Godinho JV, Valle ALM, Santos M et al (2016) Лицо, содержание и достоверность моделирования микрохирургии опухоли головного мозга с использованием модели плаценты человека. Оперативный нейрохирург 12 (4): 61–67
Статья Google Scholar
Evgeniou E, Walker H, Gujral S (2018) Роль моделирования в микрохирургическом обучении. J Surg Educ 75: 1
Статья Google Scholar
Hung AJ, Zehnder P, Patil MB, Cai J, Ng CK, Aron M, Gill IS и др. (2011) Лицо, содержание и конструктивная валидность нового симулятора роботизированной хирургии. J Urol 186 (3): 1019–1025
Статья Google Scholar
Kelly DC, Margules AC, Kundavaram CR, Narins H, Gomella LG, Trabulsi EJ, Lallas CD (2012) Подтверждение лица, содержания и построения симулятора навыков да Винчи. Урология 79 (5): 1068–1072
Статья Google Scholar
Ghanem A, Podolsky DJ, Fisher DM, Wong RKW, Myers S, Drake JM, Forrest CR (2019) Экономия движений руки во время операции на волчьей пасти с использованием высококачественного симулятора волчьей пасти. Cleft Palate Craniofac J 56 (4): 432–437
Applebaum MA, Doren EL, Ghanem AM, Myers SR, Harrington M, Smith DJ (2018) Компетенция в области микрохирургии во время ординатуры по пластической хирургии: объективная оценка навыков интегрированная программа обучения в ординатуре. Эпластика 25; 18: e25.
Beard J, Jolly B, Newble D, Thomas WEG, Donnelly J, Southgate LJ (2005) Оценка технических навыков хирургических стажеров. (John Wiley & Sons Ltd.) John Wiley & Sons Ltd.
Goderstad JM, Sandvik L, Fosse E, Lieng M (2016) Оценка хирургической компетентности: разработка и проверка рейтинговых шкал, используемых для лапароскопической супрацервикальной гистерэктомии . J Surg Educ 73: 4
Статья Google Scholar
Balasundaram I, Aggarwal R, Darzi LA (2010) Разработка учебной программы по микрохирургии. Br J Oral Maxillofac Surg 48 (8): 598–606
Артикул Google Scholar
Bettega G, Ochala C, Hitier M, Hamou C, Guillermet S, Gayet P, Coll J-L (2015) Флуоресцентная ангиография для планирования и мониторинга лоскута в реконструктивной хирургии. F.D. Дип и др. (ред.), Флуоресцентная визуализация для хирургов: концепции и приложения.Издательство Springer International, Швейцария. https://doi.org/10.1007/978-3-319-15678-1_32
Хамауи К., Саадеддин М., Садидин Х. (2014) Обучение хирургическим навыкам: пора начинать раньше. Клинический учитель. [онлайн] 11 (3): 179–183
Статья Google Scholar
Hennessey IAM, Hewett P (2013) Конструктивная, одновременная и достоверность содержания лапароскопического симулятора eoSim. J Laparoendosc Adv Surg Tech A 23 (10): 855
Gröne J, Lauscher J, Buhr H, Ritz J (2010) Лицо, содержание и построение достоверности нового реалистичного тренажера для традиционных методов в хирургии пищеварения. Langenbeck’s Arch Surg 395 (5): 581–588
Артикул Google Scholar
Gavazzi A, Bahsoun AN, Van Haute W, Ahmed K, Elhage O, Jaye P, Khan MS, Dasgupta P (2011) Лицо, содержание и конструктивная достоверность симулятора виртуальной реальности для роботизированной хирургии (робот SEP ).Ann R Coll Surg Engl 93 (2): 152–156
Статья Google Scholar
Seixas-Mikelus S, Stegemann AP, Kesavadas T, Srimathveeravalli G, Sathyaseelan G, Chandrasekhar R, Wilding GE, Peabody JO, Guru KA (2011) Проверка содержания нового роботизированного хирургического симулятора. BJU Int 107 (7): 1130
Артикул Google Scholar
Канг С.Г., Чо С., Канг С.Х., Хайдар А.М., Самаведи С., Палмер К.Дж., Патель В.Р., Чеон Дж. (2014) Модуль трубки 3, предназначенный для отработки пузырно-уретрального анастомоза в роботизированном симуляторе виртуальной реальности: определение лицо, содержание и построение действительности.Урология 84: 345–350
Рамачандран С., Ганем А.М., Майерс С.Р. (2013) Оценка компетенции в области микрохирургии — где мы сейчас?: Оценка компетенции в области микрохирургии. Микрохирургия 33 (5): 406–415
Статья. Google Scholar
Ghanem A, Pafitanis G, Myers S, Kearns M, Ballestin A, Froschauer S, Akelina Y et al (2020) Согласованное заявление Международного общества моделирования микрохирургии (IMSS) по минимальным стандартам для базового курса микрохирургии, требования к глобальной рейтинговой шкале микрохирургических анастомозов и минимальные пороги обучения.Травма S0020-1383 (20) 30078-4. https://doi.org/10.1016/j.injury.2020.02.004
Варварес М.А., Лин Д., Хэдлок Т., Аззизаде Б., Гликлич Р., Раунды М., Рокко Дж. и др. (2005). множественный последовательный свободный перенос тканей на голову и шею. Ларингоскоп 115 (1): 101–104
Артикул Google Scholar
Grober ED, Hamstra SJ, Wanzel KR, Reznick RK, Matsumoto ED, Sidhu RS, Jarvi KA (2003) Валидация новых и объективных показателей микрохирургических навыков: анализ движений рук и стереоскопическая острота зрения.Микрохирургия 23 (4): 317–322
Статья Google Scholar
Moulton C-A E, Dubrowski A, MacRae H, Graham B, Grober E, Reznick R (2006) Обучение хирургическим навыкам: какая практика делает совершенство?: Рандомизированное контролируемое испытание , . Ann Surg 244 (3): 400–409
Сингх М. (2012) Роль высокочастотного электромагнитного отслеживания движений руки постоянного тока как инструмента объективной оценки в обучении микрохирургии . MSc. Имперский колледж в Лондоне
Arkes HR (1981) Препятствия для точного клинического суждения и возможные способы минимизировать их влияние. J Consult Clin Psychol 49 (3): 323–330
CAS Статья Google Scholar
Бауманн А.О., Дебер Р.Б., Томпсон Г.Г. (1991) Чрезмерная самоуверенность врачей и медсестер: феномен «микро-определенность, макро-неопределенность». Soc Sci Med 32 (2): 167–174
CAS Статья Google Scholar
Перенос сухожилия широчайшей мышцы спины при обратном артропластике плеча: расположение переноса влияет на силу
Предпосылки
Оптимальное место установки переноса сухожилия широчайшей мышцы спины для восстановления внешней ротации после обратного артропластики плеча (RSA) не определено.Целью этого биомеханического исследования было определить влияние местоположения переноса сухожилия на внешний вращательный момент в сочетании с различной латерализацией плечевого компонента RSA. Мы предположили, что проксимальный перенос сухожилия, наряду с увеличением латерализации плечевой кости, может максимизировать внешний вращательный момент.
Методы
Восемь свежезамороженных плечей трупа подверглись RSA и были протестированы на имитаторе плеча in vitro. Перенос сухожилия широчайшей мышцы спины был протестирован в трех местах введения (латеральная большая бугристость [Lat-GT]; незначительный след круглой мышцы [Tm-FP]; боковой стержень [Lat-Shft]), и был измерен момент внешнего вращения.Дополнительные условия испытаний включали различную латерализацию плечевого компонента (-5, 0, +5, +10, +15 мм), угол отведения (0 °, 45 °, 90 °) и внутреннюю / внешнюю ротацию (-60 °, -30 °). °, 0 °, 30 °, 60 °).
Результаты
Вставки Lat-GT и Tm-FP для переноса широчайшей мышцы спины генерировали значительно больший крутящий момент ( P <0,001), чем Lat-Shft. При сравнении Lat-GT с Tm-FP не было значительных различий ( P = 0,362). При 60 ° наружного вращения латерализация плечевого компонента RSA с -5 до +15 мм значительно увеличила момент внешнего вращения Lat-GT на 67% ( P =.035), Tm-FP на 43% ( P = 0,001) и Lat-Shft на 42% ( P = 0,002).
Заключение
Перенос сухожилия широчайшей мышцы спины на проксимально-латеральную сторону большей бугристости и к месту прикрепления малой круглой мышцы создает значительно больший внешний вращающий момент, чем передача на латеральный стержень плечевой кости. Кроме того, использование плечевого компонента с большим смещением также существенно увеличивает крутящий момент, создаваемый переносом сухожилия.
Уровень доказательности
Фундаментальное научное исследование
Биомеханика
Ключевые слова
Обратное тотальное эндопротезирование плеча
Перенос сухожилия широчайшей мышцы спины
Латерализация плечевого компонента
Разрыв малой тересы
статьи о артропатии
статьи о артропатии
© 2020 Автор (ы). Опубликовано Elsevier Inc. от имени американских хирургов плечевого и локтевого суставов.
Рекомендуемые статьи
Ссылки на статьи
Техническая концепция и оценка нового тренажера плеча с адаптивным генерированием мышечной силы и свободным движением
Плечо человека — один из самых сложных суставов человеческого тела, который из-за большого диапазона движений и сложного аппарата мягких тканей предрасположен к травмам.Хирургические методы лечения и замены суставов часто приводят к неудовлетворительным результатам. Чтобы лучше понять сложную биомеханику плеча, необходимо провести экспериментальные исследования. Для этого был разработан новый тренажер для плечевого сустава с инновационным генератором мышечной силы. На основе модульной концепции были интегрированы шесть искусственных пневматических мышц, представляющих наиболее важные в функциональном отношении мышцы плечевого сустава, благодаря чему можно осуществлять свободное и контролируемое движение плечевой кости.Для каждой мышцы индивидуальные уставки для контроля длины мышцы на основе определенного пользователем движения плеча для любого искусственного образца или образца трупа создаются с помощью ручного движения «Teach-In». В дополнение к мышечным силам и длине используются оптическое отслеживание и измерение силы в суставах для проведения различных биомеханических исследований плечевого сустава. В этой статье описывается техническая установка, а также стратегия управления и первые результаты ее экспериментальной функциональной проверки.
1 Введение
Человеческое плечо играет особую роль в человеческом теле из-за его особых требований к устойчивости и подвижности [1].В Германии ежегодно имплантируется около 12 000 плечевых протезов, что делает их менее распространенными, чем искусственные колени или бедра [2]. Основной причиной меньшего количества протезов плеча является высокая сложность плечевого сустава человека, в результате чего трудно найти подходящие технические модели плеча для замены. Таким образом, результаты протезов плеча и других хирургических вмешательств часто неудовлетворительны, что мотивирует стремление улучшить существующие плечевые протезы и оптимизировать хирургические вмешательства, касающиеся плечевого сустава [3].По этой причине необходимо расширить знания о биомеханическом поведении плечевого сустава. Эти знания лежат в основе развития современных концепций реконструктивной хирургии и артропластики [1]. Одна из возможностей узнать больше о биомеханике плеча — это использование экспериментального устройства для тестирования плеча, например для анализа движения и чувствительности. Большинство тренажеров сосредоточено на оценке биомеханики плеча, когда сустав находится в статическом положении или когда пассивные движения выполняются извне с нагрузкой на мышцы или без нее [4].Kedgley et al. показали, что тренажеры, использующие постоянно изменяющиеся мышечные силы для движения плеча, производят движения с более высокой повторяемостью, чем пассивные системы, потому что приближение к физиологическому случаю ближе [5]. Лишь несколько систем исследовали кинематику и кинетику суставов с использованием движения, управляемого мышцами [4].
Одним из ограничений большинства существующих тренажеров является создание фиксированной силы для активного движения сустава. Либо применяется расчетное фиксированное соотношение мышечных сил.Часто уставка силы дельтовидной мышцы устанавливается вручную, а силы других мышц масштабируются с фиксированным соотношением, основанным на физиологической площади поперечного сечения (PCSA) каждой мышцы. Фиксированное соотношение мышечных сил может привести к неконтролируемому движению плеча. Кроме того, в качестве альтернативы используется внешний рельс, чтобы направлять плечевую кость по заданному пути и сдерживать силы, добавляя нефизиологические направляющие силы.
Ни фиксированное соотношение сил, ни направляющая, похоже, не создают физиологических условий для воспроизведения поведения биомеханических движений плеча.Помимо этого электромиография (ЭМГ) используется для определения активации мышц и оценки мышечных сил [5], [6]. Из-за перекрестного взаимодействия мышц надежность данных ЭМГ сомнительна.
Чтобы преодолеть ограничения существующих тренажеров плеча, был разработан новый инновационный аппарат для тестирования плечевого сустава с двумя основными целями:
Стабильный алгоритм управления воспроизводимым (<5 °) свободным движением с избыточной настройкой мышц для образца трупа
Качественное и количественное (отклонение <10 °) соответствие между пассивным обучением и активным свободным движением плеча
В рамках первого пилотного исследования исследуются возможности нового тренажера движения плеча.
2 Материалы и методы
2.1 Тренажер плеча — техническая установка
Одно синтетическое плечо и один образец трупа были протестированы на новом биомеханическом имитаторе плеча (рис. 1). Новый тренажер плечевого сустава содержит шесть активных пневматических мышц (DMSP, Festo, Esslingen, Германия), которые соединены веревками из сверхвысокомолекулярного полиэтилена и шкивами на шарикоподшипниках с соответствующими сухожилиями мышц. Таким образом, можно активно контролировать три части дельтовидной мышцы и мышцы вращающей манжеты [надостной, подостной + малой круглой (в сочетании), подлопаточной мышцы].Преимуществами используемых пневматических мышц являются высокая плотность силы и внутренняя податливость, необходимая для соответствия упругим свойствам образца трупа. Кроме того, две пассивные мышцы реализуются с помощью пружин (большая грудная мышца в сочетании с широчайшей мышцей спины и двуглавой мышцей плеча).
Рисунок 1:
Схема биомеханического тренажера плеча (упрощенная до 1 искусственной мышцы).
Неблагоприятное воздействие: пневматические мышцы ведут себя очень нелинейно, что затрудняет управление. Поэтому нелинейный адаптивный регулятор силы и длины был разработан на основе Цзэна и Вана [7]. При дополнительной компенсации нелинейных характеристик используемых пневматических клапанов (VPWP Festo, Esslingen, Germany) ожидается точный контроль в широком диапазоне мышечных сил и длин для изменяющегося и неизвестного пути управления, а именно образца.
Инновационный и совершенно новый подход, который реализован в новом разработанном имитаторе плеча и алгоритме управления, соответственно, и который противоречит аппарату для тестирования плеча, описанному в литературе, заключается в том, что движение плеча может контролироваться длиной мышцы, а не силами. . Это необходимо для создания контролируемых и свободных движений плеч, но зависит от подробной информации о движении и длине мышц конкретного образца с течением времени. Эта информация собирается в процессе так называемого «обучения», когда оператор перемещает плечевую кость по желаемой траектории, а мышцы контролируются силой.Во время этого движения мышцы следуют за принудительным движением, а система управления записывает длину мышц, необходимую для реализации определенной траектории. После этой процедуры система может использовать измеренные по траектории разной длины мышцы, чтобы воспроизвести движение плеча без указания оператора.
Тренажер плечевого сустава оснащен приборами для измерения длины мышц (WS10SG, ASM GmbH, Moosinning, Германия) и силы (KM30z, ME-Messsysteme, Хеннингсдорф, Германия), датчиком крутящего момента силы 6D (ATI, Apex, США). для совместных сил и моментов реакции, а также систему оптического слежения (Polaris Spectra, NDI, Онтарио, Канада) для регистрации движения руки.Система управления в реальном времени (MicroAutoBoxII, dSPACE, Падерборн, Германия) использовалась для записи данных, управления и связи со всеми включенными устройствами.
2.2 Экспериментальная проверка
Для оценки концепции управления и анализа достижимого диапазона движений (ROM) различных движений первоначально был проведен эксперимент с синтетическим плечевым суставом. Упрощенная модель плеча, сделанная из синтетических костей и эластичных резиновых лент, представляющая систему капсулярных связок (плечевой и плечевой связок), прикреплена к имитатору плеча.Это было сделано путем фиксации нижней части лопатки в пенополиуретане (PUR), а затем ее крепления к имитатору движения. Лопатки устанавливались в установке так, чтобы нейтральная плоскость гленоида была наклонена на 10 ° вверх, лопатка наклонена на 20 ° вперед, а плоскость лопатки была параллельна средней линии действия дельтовидной мышцы [8]. Прикрепления мышц и сухожилий и направления растяжения оцениваются на основе анатомических ориентиров, а суставные поверхности синтетического плеча смазываются петролатумом.
На втором этапе эксперименты повторяются с образцом человеческого трупа (рис. 2). Одна свежезамороженная верхняя конечность была получена от женщины-донора (возраст: 85 лет). Труп был здоров, суставная капсула не вентилировалась. Руку размораживали примерно при 20 ° C в течение 24 часов и поддерживали гидратации физиологическим раствором во время подготовки. Лопатку обнажали от медиальной границы до надлопаточной вырезки перед тем, как залить пеной PUR в прямоугольный блок.Затем фиксированное плечо помещали в имитатор движений. Дистальный конец плечевой кости также прикреплен к цилиндру, в котором закреплено твердое тело оптической системы слежения и пружина, представляющая двуглавую мышцу плеча. Искусственные мышцы соединяются хирургическим швом с помощью волоконных проволочных шнуров.
Рисунок 2:
Плечо трупа человека в имитаторе плеча в Аахене.
Затем желаемое движение руки было выполнено оператором вручную, в то время как искусственные мышцы находились в режиме контроля силы, и переменная длина мышц регистрировалась.После процедуры «Teach-In» движение руки выполнялось мышцами с контролируемой активной длиной. Таким образом, как синтетический образец, так и образец трупа были сочленены в различных характерных движениях (отведение / приведение, внутреннее / внешнее вращение с приведенной рукой, антеверсия / ретроверсия) с помощью физиологического ROM.
3 Результаты
В рамках эксперимента с синтетической моделью плеча были оценены общие возможности использования тренажера и его новая концепция управления.Эта установка обеспечивала воспроизводимое активное движение (воспроизводимость активного <5 °) с хорошим согласованием (<10 °) между пассивным движением «Обучение» и воспроизводимым активным движением (пример отведения показан на Рисунке 3).
Рисунок 3:
Кинематика отведения синтетической модели плеча в новом имитаторе плеча.
Оптимальные результаты были получены при отведении / приведении с успешным ROM от 0 ° до 90 °.Диапазон внутреннего и внешнего вращения составлял 80 ° –0 ° –25 °.
С помощью человеческого трупа можно было успешно выполнять и плечевые движения. Хотя успешный ROM был меньше, чем при использовании синтетической модели, движения можно было выполнять (движение отведения на рисунке 4).
Рисунок 4:
Кинематика отведения трупного образца плеча в новом имитаторе плеча.
Разница между пассивным «обучением» и активным повторным движением в целом была больше, чем с синтетической моделью плеча, потому что зашитые прикрепления искусственных мышц были более эластичными, и, следовательно, удлинение мышц было искажено.С человеческим трупом можно было выполнить полное ROM на 35–85 ° (отведение / приведение), от –30 ° до 0 ° (антеверсия) и от –25 ° до 0 ° до 20 ° (внутреннее / внешнее вращение).
4 Обсуждение и заключение
Был представлен новый инновационный тренажер движения для тестирования биомеханического поведения плечевого сустава. Это первое исследование показывает, что повторяемые движения плеча можно легко выполнять с помощью нового разработанного имитатора плеча.
Пневматические мышцы в сочетании с реализованным регулятором адаптивной силы и длины позволили точно управлять податливым актером в сочетании с неизвестным путем управления.В сочетании с новой концепцией мышечного контроля возможны свободные, но стабильные и контролируемые движения с избыточной настройкой мышц отдельного образца без использования данных ЭМГ или внешних направляющих. Это позволяет значительно улучшить моделирование свободного движения по сравнению с существующими биомеханическими симуляторами плеча. Кроме того, новый тренажер плеча дает возможность анализировать необходимые мышечные силы вместо того, чтобы оценивать их априори. В этом контексте наш эксперимент с трупом подтвердил тезис о том, что не существует приблизительно постоянного соотношения мышечных сил во время движения отведения (рис. 5).
Рисунок 5:
Приложенные мышечные силы во время отведения по отношению к объединенной силе дельтовидной мышцы (= Спинальная + Акромиальная + Ключичная) на образце трупа.
Последующее поведение активного движения повтора по сравнению с пассивным движением «Teach-In» с синтетическим плечом удовлетворило качественное и количественное стремление с отклонениями <10 °. Хотя последующее поведение с образцом трупа было не таким хорошим, как с синтетической моделью, были достигнуты хорошее качественное соответствие, а также высокая воспроизводимость активных движений.Это можно дополнительно оптимизировать, увеличив жесткость соединения с сухожилием мышцы.
У нового тренажера плеча есть некоторые ограничения. Для пневматических мышц оптимизация для более физиологического поведения является одной из целей нашей постоянной работы. Потому что особенно в поворотных точках уставок длины мышцы, например в точке изменения между отведением к приведению напряжение мышц было слабым, так что сила не передавалась. Это не соответствует физиологическому тонусу каждой мышцы.
Наша текущая работа будет сосредоточена на оптимизации регулятора длины, чтобы решить проблему, всегда прикладывая силу, превышающую заданный тон грунта, даже если это приводит к отклонениям от заданного значения. Оптимизированные зажимы для сухожилий и более подходящие методы наложения швов уже находятся в стадии разработки и оценки. Планируются дальнейшие биомеханические исследования на тренажере плеча, чтобы дать ответы на конкретные клинические вопросы и изучить различные хирургические стратегии.
Авторы хотели бы поблагодарить профессора A. Prescher, Институт анатомии, и Björn Rath, Ортопедическую клинику, RWTH Aachen University, за предоставленную подготовку образца трупа. Этот проект частично финансируется в рамках программы START медицинского факультета Ахенского университета RWTH.
Заявление автора
Финансирование исследования: Автор заявляет, что никакого финансирования не было. Конфликт интересов: авторы заявляют об отсутствии конфликта интересов.Материалы и методы: Информированное согласие: Информированное согласие неприменимо. Этическое одобрение: Проведенное исследование не связано ни с использованием людей, ни с животными.
Ссылки
[1] Гольке Ф. Биомеханик дер Шультер. Der Orthopäde. 2000; 29: 834–44. Искать в Google Scholar
[2] Лёв М., редактор. AE-Manual der Endoprothetik. Шультер: Спрингер-Верлаг; 2009. Искать в Google Scholar
[3] Wiedemann E. Schulterendoprothetik. Der Unfallchirurg. 2006; 109: 1073–84.Искать в Google Scholar
[4] Giles JW, Ferreira LM, Athwal GS, Johnson JA. Разработка и оценка производительности симулятора плеча с активным движением in vitro, управляемого in vitro нагрузкой на мышцы, и его применение для оценки обратной тотальной артропластики плеча. J Biomech Eng. 2014; 136: 121007. Поиск в Google Scholar
[5] Кедгли А.Э., Маккензи Г.А., Феррейра Л.М., Дросдовеч Д.С., Кинг Г.Дж., Фабер К.Дж. и др. Влияние мышечной нагрузки на кинематику плечевого отведения in vitro.J Biomech. 2007; 40: 2953–60. Искать в Google Scholar
[6] Веллманн М., Петерсен В., Зантоп Т., Шанц С., Рашке М.Дж., Хуршлер С. Влияние резекции коракоакромиальной связки на стабильность плечевого сустава при активной мышечной нагрузке в модели in vitro. Артроскопия. 2008; 24: 1258–64. Искать в Google Scholar
[7] Цзэн К., Ван Дж. Нелинейное ПИД-регулирование электронной дроссельной заслонки. В области электротехники и управления (ICECE), Международная конференция по IEEE 2011 г .; 2011. с. 722–4. Искать в Google Scholar
[8] Hochschild J.Strukturen und Funktionen greifen, Funktionelle Anatomie: Band 1: Wirbelsäule und obere Extremität. Георг Тиме Верлаг; 2014. Искать в Google Scholar
Опубликовано в сети: 2016-9-30
Напечатано в печати: 2016-9-1
© 2016 Марк Верджанс и др., Лицензиат De Gruyter.
Эта работа находится под лицензией Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 License.
SimTK: Полная скелетно-мышечная модель поясничного отдела позвоночника: Project Home
Разработайте общедоступную модель всего тела с обширной мускулатурой туловища и степенями свободы в поясничном отделе позвоночника, которую можно использовать для моделирования движений всего тела, исследующих мускулатуру и динамику поясничного отдела позвоночника.
Лицензия: Fullbodylumbar, Модель поясничного отдела всего телаМодель поясничного отдела всего тела (FBLS) была создана путем объединения других ранее разработанных моделей OpenSim (https://simtk.org/home/lumbarspine, https://simtk.org/home/runningsim, https://simtk. org / home / lowlimbmodel09). Цель разработки этой модели состояла в том, чтобы предоставить пользователям модель всего тела, подходящую для исследования мускулатуры туловища и поясничного отдела позвоночника.
Вкратце, эта модель состоит из 21 сегмента, 29 степеней свободы и 324 исполнительных механизмов сухожилий сухожилий. Пять поясничных позвонков смоделированы как отдельные тела, каждое из которых соединено суставом с шестью степенями свободы. Чистое поясничное движение описывается как сгибание-разгибание, осевое вращение и латеральное изгибание путем наложения ограничивающих функций на каждый отдельный поясничный позвонок. Смоделированы восемь основных групп мышц поясничного отдела позвоночника, каждая из которых состоит из нескольких пучков, что позволяет большим мышцам действовать в разных направлениях.Эти мышцы туловища включают: прямые мышцы живота, внешние косые мышцы живота, внутренние косые мышцы живота, мышцы, выпрямляющие позвоночник, мультифидусную мышцу, квадратную мышцу поясницы, большую поясничную мышцу и широчайшую мышцу спины.
Эта модель в настоящее время подходит для запуска статической оптимизации, но еще не подходит для компьютерного управления мышцами (CMC). Будущий выпуск модели будет подходить для CMC.
Эта страница проекта сделает модель бесплатно доступной для пользователей OpenSim и будет включать информацию о процедурах разработки и проверки модели.
Произошла ошибка при настройке вашего пользовательского файла cookie
Произошла ошибка при настройке вашего пользовательского файла cookieЭтот сайт использует файлы cookie для повышения производительности. Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера для приема файлов cookie
Существует множество причин, по которым cookie не может быть установлен правильно. Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie.Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались. Чтобы принять файлы cookie с этого сайта, нажмите кнопку «Назад» и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом. Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie.Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie. Вы должны отключить приложение при входе в систему или проконсультироваться с системным администратором.
Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу.Чтобы предоставить доступ без файлов cookie потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файлах cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта.Например, сайт не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.
Роботизированная широчайшая мышца спины при отсроченной немедленной реконструкции груди
Может ли роботизированная навигация упростить сложные процедуры реваскуляризации и эмболизации?
Роботизированная система Magellan ™ представляет собой периферийную платформу для интервенционных вмешательств, которая может обеспечить точную эндоваскулярную навигацию и проведение терапии с использованием трехмерного управления роботизированными управляемыми катетерами и проводниками (1), быстрых и предсказуемых процедур (1), навигации по сосудам с меньшими травмами, чем мануальные подходы (2), стабильность катетера во время доставки и размещения терапевтических устройств, защита врача от радиационного воздействия и процедурной усталости.Он разработан для легкой интеграции в гибридную операционную и интервенционную лабораторию.Наше отделение начало исследование с роботизированной системой Magellan ™ в ноябре 2012 года. До тех пор, пока в нашем учреждении не стала доступна гибридная комната, система была установлена в лаборатории катетеризации, где нам не разрешалось выполнять какие-либо сокращения.
В наше исследование было включено 35 пациентов, включая пролеченные реваскуляризацию подвздошной и бедренной артерий в 19 и 2 случаях соответственно, внутренние подвздошные аневризмы в 4 случаях, аневризмы селезенки в 3 случаях, ангиопластики почек в 3 случаях, EVAR для катетеризации контралатеральной конечности в 2 случаях, подключичная реканализация артерии в 1 случае и эмболизация вены яичника в 1 случае.
Что касается реваскуляризации подвздошной кости, как и других (3), мы обнаружили, что роботизированная система полезна для длительной реканализации общей или внешней подвздошной артерии, а также для множественного стентирования аорто-подвздошного дерева (до 4 стентов у одного пациента. для реконструкции обеих бифуркаций подвздошной кости) одним бедренным доступом.
Что касается реканализации подвздошной артерии, система позволяет перемещаться внутри аневризматического мешка внутренней подвздошной артерии, выполнять эмболизацию нескольких ветвей, а также закрывать проксимальную шейку внутренней подвздошной артерии над аневризмой, тем самым избегая покрытия подвздошной оболочки стент.
В одном случае мы выполнили эмболизацию дистальной части гонадной вены через день после лапароскопической транспозиции почечной вены с использованием робота Da Vinci ™ (4).
В заключение, наш первоначальный опыт сложных процедур реваскуляризации и эмболизации продемонстрировал, что роботизированные технологии эффективны и безопасны в подвздошной артериальной артерии. Хотя робототехника обеспечивает превосходную маневренность по сравнению с современными технологиями, эндоваскулярный опыт имеет решающее значение для полного использования дополнительных возможностей.
Ссылки:
1. Bismuth J, Stankovic M, Gerzak B, Lumsden AM. Роль гибкой робототехники в преодолении проблем навигации в подвздошно-бедренной артерии: первое исследование на человеке. 69-е Ежегодное собрание SVS, июнь 2011 г. Чикаго, США.
2. Висмут Дж., Кашеф Э., Чешир Н., Ламсден А. Возможность и безопасность удаленной эндоваскулярной катетерной навигации на модели свиньи. Журнал Endovasc Ther 2011; 18: 243-9.
3. Висмут Дж., Дюран С., Станкович М., Герсак Б., Ламсден А.Б. Исследование роли гибкой робототехники в преодолении проблем навигации в подвздошно-бедренных артериях впервые проведено человеком.J Vasc Surg 2013; 57: 14S-9S.
4. Таво Ф., Николини П., Люсеро Б., Георг Й., Лежай А., Чакфе Н. Ассоциированные роботизированные системы Да Винчи и Магеллана для успешного лечения синдрома Щелкунчика. J Laparoendos Adv Surg Tech, в исправлении.
Разработка и проверка своевременной и репрезентативной конечно-элементной модели позвоночника человека для биомеханического моделирования
Достижения в области вычислительной биомеханики проложили путь для более точных представлений модели конечных элементов человеческого торса и его биомеханического поведения.Эти модели FE обычно строятся на основе математических представлений (т.е. рассматриваются для конкретных случаев), которые не учитывают точные геометрические представления и могут привести к чрезмерно упрощенной модели. Хотя для конкретных случаев такие приближения и предположения верны, такое упрощение уводит такие модели от точного физиологического представления. Например, в последнее время было показано, что такие эффекты, как давление в брюшной полости, мышечное давление и грудопоясничная фасция 38,67 , играют роль в биомеханике позвоночника, и, следовательно, их включение в биомеханические модели может быть оправдано, если сосредоточить внимание на них. исследования по этому поводу.
В соответствии с этим, трехмерная репрезентативная новая полномасштабная биомеханическая КЭ модель позвоночника была успешно построена и утверждена. Модель состояла из тел грудных и поясничных позвонков, межпозвонковых дисков, брюшной стенки и ее внутрибрюшного давления, грудопоясничной фасции, длиннейшей, многораздельной, поясничной большой, широчайшей и межпозвоночной мышц, а также сопровождающих их сухожилий.
Разработка модели
Геометрическому моделированию уделялось внимание с целью сохранения характеристик МРТ.То есть было выполнено несколько итераций моделирования, чтобы каждая деталь была смоделирована точно без существенной потери качества. Например, модели тел позвонков и межпозвоночных дисков были созданы с качеством не менее 94%. Это было достигнуто за счет непосредственного огранки этих частей и сохранения замкнутого объема для моделирования деформируемого тела. Брюшная стенка, с другой стороны, требовала относительно больших усилий, так как требовалось прослеживать мышцы живота, достигая фронтальной стороны тел позвонков и диафрагмы сверху.Это потребовало сбора множества мнений о форме брюшной полости и ее биомеханическом поведении. Кроме того, создание репрезентативной модели мышц и приложенного к ним давления было утомительным занятием, которое в большинстве разработанных моделей заменяется векторами силы. Таким образом, первым шагом на пути к построению настоящей модели было создание модели передней большеберцовой мышцы, пригодной для прогнозирования мышечных сил по ее IMP и наоборот 33 . Тем не менее, поскольку сухожилия являются функциональными пассивными частями мышечной структуры, разделение обеих частей с целью лучшего моделирования анатомии двух структур потребовало создания и огранки некоторых утраченных сухожилий.Это привело к некоторой потере точности, особенно для многораздельной мышцы из-за ее компактности, поскольку объемная разница увеличилась примерно до 81% по сравнению с исходными компонентами на основе МРТ. Тем не менее, это было учтено в модели сухожилия и, в конечном счете, части самой мышцы. Наконец, грудопоясничная фасция в последнее время привлекает все большее внимание, и поэтому было выдвинуто предположение, что ее включение играет роль в распределении силы в модели. Однако в исходной модели отсутствовало соединение TLF с позвонком, что требовало интеграции фасеточных соединений в спинной части позвонка.Подобная двухмерная планарная модель TLF была проверена и исследована авторами 38 . Таким образом, авторы стремились к точному моделированию всех компонентов.
Создание репрезентативной вычислительной сетки считается одним из наиболее важных этапов в КЭ-моделировании. Как правило, исследователи стремятся создать сетку, которая надежно воспроизводит результаты, но сохраняет низкую сложность для проведения будущих симуляций в разумные сроки. Тем не менее, первоначальное моделирование проводилось с использованием обычных методов, что привело к значительным накладным расходам, требующим месяцев для решения.Следовательно, настоящая модель была построена с использованием нетрадиционной новой техники. Как описано в методике, поверхности контактирующих тел были созданы вручную. Таким образом, нелинейные контактные вычисления были значительно сокращены, в результате чего механизм передачи нагрузки между контактирующими телами следовал явному решению, а не итеративному нелинейному, как в случае нелинейных контактных алгоритмов ANSYS. То есть весь позвоночник стал одной структурой с точки зрения зацепления, для которой деформация одного объекта напрямую влияет на соседние компоненты.В механике человеческого тела это фактически рекомендуется для обеспечения однородного плавного движения всех частей тела. Следовательно, для сравнения, этот новый метод построения сеток привел к огромному сокращению для достижения результатов моделирования менее чем за 3 минуты на одно моделирование, в зависимости от свойств материала и граничных условий.
Проверка модели
Для обеспечения вычислительной надежности проверка играет ключевую роль в любой построенной модели FE. Учитывая большое количество компонентов, введенных в модель, проверка целостности модели за один шаг была невозможна, чтобы конкретно определить, что такая модель не существует, насколько известно авторам.Таким образом, как подробно описано в разделе о методологии, было проведено всестороннее тематическое исследование с целью проверки модели с разбивкой по подразделам.
Мышцы и внутреннее давление
Моделирование скелетных мышц как структур, находящихся под давлением, дает более точное представление о сокращении мышц, играя важную роль как в межмышечном, так и в внутримышечном давлении. Достоверность этой процедуры моделирования проистекает из доказанного достоверного представления о двух состояниях мышцы с жидкой структурой, которое было ранее проведено 33 .Тем не менее, все еще было важно исследовать, изменит ли масштабирование мышц соотношение IMP-F. При реалистичной сократительной силе мышц, собранной из данных ЭМГ, как показано ранее, мышцы большой поясничной мышцы (PM) производили значительное сгибание позвоночника при силе 275 Н и разгибание при силе противоположных мышц 75 Н., как было предложено Cholewicki et al. 47 . Фактически, линейная корреляция между мышечными силами и IMP постоянно сохранялась (рис. 4a). Такие результаты были очень обнадеживающими для моделирования всех других скелетных мышц, представленных в модели, с использованием той же процедуры из-за доказанного потенциала этой точной и репрезентативной модели мышц в поле FE.
Поясничный отдел позвоночника
Модели поясничного отдела позвоночника привлекли большое внимание, что привело к передовым исследованиям среди исследователей-биомехаников. Усилия, предпринятые Dreischarf et al. 17 , сравнивающая восемь различных хорошо разработанных моделей FE поясничного отдела позвоночника, представляла особый интерес, поскольку проверка их одновременности повысила бы точность и достоверность представленных моделей поясничного отдела позвоночника. Таким образом, при моделировании сгибания вперед результаты показали линейное увеличение изгибающего момента с 5.От 5 до 9,3 Нм при увеличении угла сгибания. Линейность в этом случае проистекает из линейной зависимости между силой и изгибающим моментом, представленной в формуле. (1). Кроме того, точный прогноз 7,5 Нм произошел при угле сгибания 33 ° (рис. 4b). В их исследовании результаты in vitro показали, что момент 7,5 Нм будет результатом сгибания на \ (35 \ pm 2 \) °. Тем не менее, при существующем подходе к применению диапазона изгиба и измерения результирующего изгибающего момента, приложенная к ним ведомая нагрузка будет скорее результатом, чем входом в текущее исследование.Таким образом, восстановление сжимающей нагрузки на уровне L 5 привело к нагрузке 977 Н, имитирующей приложенную ими нагрузку на толкатель в 1000 Н. Основная причина для моделирования поясничного сгибания таким способом заключается в том, что одной из важнейших особенностей полной модели является включение основных мышц позвоночника. То есть, для точного представления мышц, производящих движение позвоночника, было интересно свести к минимуму другие приближения, которые могли бы заменить любое мышечное усилие, в основном нагрузки ведомого и вклад мышц, моделируемые как векторы силы.
В целом, достигнутые результаты доказали высокую точность существующей модели поясничного отдела позвоночника FE в сочетании с заявленными свойствами материала по сравнению с ранее хорошо разработанными моделями поясничного отдела позвоночника в литературе.
Интрадискальное (МПД) давление
Как описано во введении, боль в пояснице часто связана с нарушением функции поясничного отдела позвоночника, связанным с чрезмерным давлением поясничных дисков. Являясь одной из основных причин, ведущих к инвалидности 68 , данные внутридискового давления в условиях боли в пояснице широко доступны.Это позволило провести дополнительную проверку поясничного отдела позвоночника, в основном исследуя точность модели позвоночника для прогнозирования давления МПД.
В первом сценарии при нормальном диапазоне сгибания / разгибания, описанном в тесте для поясничного отдела позвоночника , давление МПД увеличивалось с диапазона 0,41–0,43 МПа до 0,59–0,66 МПа (рис. 5a) для всего диапазон IVD 1 –IVD 5 . Данные очень напоминали результаты нескольких предыдущих исследований 64,65,66 с максимальным расхождением 14%, как показано в разделе результатов.Хотя такая разница не имеет особого значения, если рассматривать ее во всем диапазоне, значения давления МПД находятся в пределах нормальных физиологических диапазонов 64 . Такие различия могут быть напрямую связаны с тем, что другие мягкие ткани были исключены из этого исследования. Тем не менее, включение таких компонентов, особенно TLF, позволяло сохранять значительную нагрузку в этих мягких тканях. При более плавном переходе нагрузок, о чем свидетельствуют результаты текущего теста, меньшее давление оказывается на МПД и на позвоночник в целом, что приводит к более репрезентативному внутридисковому давлению.
Оценка давления МПД по средней нормальной нагрузке на поверхность МПД оказалась точной в ранее исследованной мышечной модели 33 . Это связано с тем, что для толстостенных герметичных конструкций радиальное напряжение равно и противоположно манометрическому давлению на внутренней поверхности 69 . Однако при разделении МПД на пульпозное ядро и фиброз кольца ядро моделировалось как структура, заполненная гидростатической жидкостью.Результаты для давления МПД 5 показали, что обе процедуры очень похожи друг на друга с максимальным расхождением примерно 4% при сгибании 34 ° (рис. 5b). Очевидно, что второй подход обеспечивает более точное представление биомеханики позвоночных дисков. Однако, как и во всех анализах FE, до тех пор, пока модель предсказывает точные результаты, приближения в соответствии с менее затратным в вычислительном отношении подходом остаются применимыми.
В целом, результаты теста внутридискового давления (IVD) позволяют предположить наличие утвержденной модели позвоночных дисков.В сочетании с тестом на поясничный отдел позвоночника оба теста предполагают полностью подтвержденную структуру позвоночника, аналогичную большинству опубликованных моделей позвоночника, которые состоят из тел позвонков и межпозвонковых дисков. По сути, это закладывает основу для передовых исследований и оценки боли в пояснице, которая сильно коррелировала с давлением МПД 68 .
Полная валидация позвоночника
Заключительный тест проводился с целью сделать вывод о достоверности полной модели. Однако из-за новизны модели не было найдено ни одной предыдущей модели, очень похожей на нынешнюю.Таким образом, модель была сначала проверена на одной из наиболее сложных моделей, предложенных Huynh et al. 61 , после чего были включены все остальные мягкие ткани, чтобы прокомментировать полную достоверность модели.
Первоначально применение все большего сгибания вперед на базовой модели приводило к большему смещению VB T 10 –L 5 (рис. 6a). Также было замечено, что такие смещения уменьшаются до исчезновения на уровне поясничного отдела позвоночника, что свидетельствует о сильной поддержке, обеспечиваемой МПД.Результаты «Сила – Смещение» были в хорошем согласии с результатами Хюня вплоть до силы 350 Н. Однако исследование Хюня показало, что смещения позвонков выходят на плато при 350 Н, после чего они снова начинают уменьшаться, что настоящая модель не могла предсказать. Это было нелогично, поскольку численно считается, что смещения в конечном итоге увеличиваются при сгибании. Результаты, полученные Huynh’s, можно отнести к принятой системе координат, из которой казалось, что они измеряли смещения только в одном направлении и относительно фиксированной системы координат, а не обновляли и измеряли направленное смещение.Кроме того, чрезмерное движение их модели позвоночника превышало физиологический диапазон статического сгибания позвоночника, для чего они непрерывно применяли сгибание, пока позвоночник не оказался в перпендикулярном положении по отношению к своему первоначальному. Несмотря на это, основание данной модели близко соответствовало их результатам вплоть до точки максимального смещения с очень небольшим расхождением в 6%, зарегистрированным для T 11 при силе 300 Н.
Поскольку модель учитывает фактические структуры скелетных мышц, а не использует векторные силы, более репрезентативно воспроизвести сгибательное движение через сокращение мышц.Тем не менее, разумные силы должны передаваться через мышцы, что послужило причиной принятия предыдущих данных о мышцах 47 . Такие данные предполагали максимальное положение сгибания с общей силой 382 Н на уровне Т 1 , что было немного выше, чем ранее использовавшийся максимум 350 Н, но все же было достаточно близко, чтобы предположить, что мышцы способны производить точное сгибание позвоночника. . После этого были включены все части для исследования общего воздействия на смещения тел позвонков.Для сил, представленных в Таблице 3, результаты «Сила – Смещение» следовали той же тенденции, но со значительным снижением смещения позвонков (Рис. 6b). То есть корреляция осталась неизменной, но предполагала значительный вклад других мягких тканей. Добавление абдоминального давления от 5 до 36 мм рт. Ст. Сыграло роль сопротивления, поддерживая поясничный отдел позвоночника. При исследовании таких значений давления они не казались произвольными. То есть они очень хорошо сравнивались со значениями IAP Mueller’s et al. 70 . Кроме того, как и предполагалось, грудопоясничная фасция, по-видимому, также играет важную роль в поддержке позвоночника. С увеличением степени сгибания TLF создавал увеличивающуюся силу с 12 до 139 Н, сопротивляясь движению сгибания вперед и, таким образом, поддерживая роль сохранения достаточного напряжения, чтобы позвоночник мог выдерживать чрезмерные нагрузки. Эти данные также подтверждают результаты теста внутридискового давления (МПД) , в котором включение других мягких тканей снижает сгибание позвоночника, что оказывает меньшее давление на МПД.Комбинируя все четыре теста, предложенная модель показывает точные и достоверные результаты с возможностью использования ее для проведения исследований позвоночника.
Анализ чувствительности
Как и в любой модели FE, важна проверка формы модели и повторяемости результатов по входным параметрам. Таким образом, руководящие принципы, сформулированные ASME V&V 40-2018 для численных моделей в области биомеханики, были соблюдены, чтобы выполнить применимые условия чувствительности, необходимые для заключения о проверке модели.
Изучение формы модели было необходимо для того, чтобы убедиться, что моделируемые детали правильно захватывают снимки МРТ, на которых основана модель. Для этой цели наиболее подходящей метрикой, казалось, был объем каждой части. Результаты показали, что смоделированные части превосходно согласуются с данными МРТ с максимальной разницей в 6,17%, зарегистрированной для IVD 2 (рис. 7a). Это доказывает, что все детали были точно смоделированы графически с небольшой погрешностью.
Кроме того, исследование чувствительности модели к принятой сетке имеет решающее значение, поскольку сетка была одной из новинок модели.Кроме того, обычной практикой во всех КЭ-моделях, с помощью которой исследователи проверяют точность численных результатов, является анализ чувствительности сетки. Для этой модели были исследованы различные методы построения сеток, как линейные, так и нелинейные (рис. 7b). Результаты показали очень хорошее согласие с максимальным расхождением 8,7% между исходной сеткой и тетраэдрической сеткой второго порядка. Стоит отметить, что наблюдалось значительное сокращение времени вычислений при использовании сетки второго порядка только для поясничной модели.Возможно, при приемлемом уровне несоответствия использование исходной сетки дает большой потенциал, благодаря устранению нелинейностей высокого порядка, для использования модели в медицинских приложениях в качестве инструмента быстрой оценки позвоночника или для оптимизации конструкции имплантата, поскольку Примеры.
Следовательно, с такими приемлемыми пределами различия, модель можно смело считать устойчивой к критическим параметрам, используя как точную действительную, так и повторяемую проверенную репрезентативную новую полную модель позвоночника.
Ограничения
Как и в любой модели in silico, ограничения неизбежны из-за схемы аппроксимации и сделанных предположений. Однако такие ограничения не ограничивают возможности модели до тех пор, пока доказано, что модель с ее фиксированными входными параметрами является действительной и точной по отношению к содержанию использования, на которое нацелено дальнейшее исследование. Одним из ограничений разработанной модели, описанной здесь, являются свойства материала и используемые законы материала. В частности, в данном расследовании отсутствует тематическое исследование чувствительности материального имущества.Из-за огромного количества включенных деталей, каждая из которых имеет широкий диапазон приемлемых свойств материала, проведение чувствительности для всех возможных комбинаций было бы исчерпывающей мерой. Однако, поскольку принятые свойства материала были ранее подтверждены и взяты из исследований, по которым была проверена текущая разработанная модель, результаты которых дополнительно подтвердили ее пригодность, такое ограничение не может считаться значительным.
Применение модели в качестве инструмента для клинической оценки статической стабильности позвоночника требует баланса между точностью и затратами времени моделирования.Без существенной потери точности, помимо новой сетки, созданной для этой конкретной модели, принятые законы о материалах позволили значительно сократить время моделирования. Хотя они были в основном линейными, учитывая квазистатический характер модели, максимальный диапазон смоделированного движения все еще находился в пределах упругого режима всех компонентов при нелинейном моделировании (гиперупругость, взаимодействие нескольких состояний и временные эффекты). В частности, на рис. 7c показана максимальная деформация, зарегистрированная для VB, МПД, сухожилий, мышц и TLF, которые были равны 0.14, 5,3, 3,5, 9,2 и 2,6% соответственно. Такие результаты хорошо согласуются с линейным режимом кривых растяжения каждого из этих компонентов 25,71,72,73,74,75 ; таким образом, это сильно подтверждает обоснованность использования линейных законов материала для этого диапазона статического движения.
Хотя принятая сетка может считаться разумным подходом к экономии времени, можно утверждать, что ее реализация снижает точность модели на небольшой процент. Однако, помимо того, что такое расхождение незначительно с учетом всех факторов, такая методика построения сетки имеет значительный прикладной потенциал.Одним из них является значительное сокращение времени вычислений, позволяющее использовать его в реальных приложениях. Он также представляет способ численного анализа, для которого избыточные нелинейности могут быть преодолены с помощью такого тщательного построения сетки.
Наконец, проверка модели была утомительной задачей из-за отсутствия литературы по моделированию полного позвоночника. В частности, модель нужно было проверять по подразделам, а не проводить прямую схему проверки. Даже при таком подходе были предприняты значительные усилия для проверки сечения мягких тканей модели.Поскольку в литературе обычно моделируются такие эффекты, как векторы сил, или даже полностью устраняются их, необходимо было объединить несколько исследований, чтобы добиться полной валидации позвоночника. Несмотря на то, что результаты показали близкое сходство, все же можно утверждать, что это может быть не лучший подход для достижения валидации из-за различных отдельных ошибок, интегрированных в окончательную модель. Тем не менее, с полученными результатами авторы смело предположили, что такие анонимные ошибки были устранены, в результате чего была получена потенциально полностью проверенная модель.
Дальнейшая работа
Возможности этой модели выходят за рамки численного моделирования и проверки. Использование такой модели может помочь в различных промышленных и биомеханических областях, от оценки травм позвоночника, исследования боли в пояснице и до проектирования и оптимизации медицинских устройств. Авторы далее признают, что это был первый шаг к важным исследованиям, которые будут выполнены, но выходят за рамки данной статьи. Однако в первую очередь следует рассмотреть более подробный анализ чувствительности для учета свойств материала, толщины моделей оболочки и дальнейшего более точного моделирования других деталей, если это будет сочтено необходимым.
Ожидаемый вклад
Авторы с уверенностью предполагают, что это исследование может внести свой вклад в области моделирования и биомеханики. Модель представляет подход, возможно, лучшего моделирования биологических тканей для полного представления механики позвоночника человека. Включение грудопоясничной фасции, брюшной полости, а также учет мышечного внутримышечного давления в одной модели позвоночника само по себе является новинкой. Кроме того, эта статья представляет метод построения сетки, применимый для любой сложной системы, которая действует как унитарная структура, а не интегрирует эффекты использования сложных вычислений числовых узлов и элементов в контакте.
В заключение, в этом исследовании была разработана и подтверждена новая трехмерная объемная модель конечных элементов позвоночника, включая тела позвонков, межпозвонковые диски, основные мышцы туловища, точное моделирование внутрибрюшного давления, а также грудопоясничная фасция. Модель была построена с использованием новой техники построения сеток, которая позволила устранить избыточные нелинейности, связанные с расчетами контактов, и значительно ускорила необходимое время расчета. Модель была косвенно подтверждена по нескольким ранее опубликованным моделям в четырех различных проверочных тестах.Все результаты испытаний показали, что модель дает надежные результаты при точном учете входных параметров. Наконец, модель оказалась надежной в свете анализа формы модели и чувствительности сетки. Эта новая модель обеспечивает точный метод моделирования механики позвоночника с возможностью использования ее для различных медицинских целей, от оценки травм до разработки или оценки хирургического лечения.